Caso práctico con PLC Siemens ET200SP
Por Carlos Urrestarazu
Ola, chámome Carlos Urrestarazu e, con este artigo, comezo unha serie de publicacións destinadas a compartir experiencias reais no campo da automatización industrial . O noso equipo da oficina técnica traballa nunha variedade de proxectos, e un dos máis recentes é a implementación de comunicacións CANopen entre sensores, actuadores e un PLC Siemens ET200SP , unha solución clave para entornos de automatización avanzados.
Este estudo de caso axúdache a comprender como programar un sistema eficiente e seguro, aproveitando as vantaxes do bus de campo CANopen : cableado reducido, custos optimizados e unha arquitectura robusta e orientada á seguridade. Este protocolo é algo inusual para traballar, especialmente se nunca o usaches antes.
✅ Estudo de caso: Control de guincho para pozos de barrena
O proxecto consistiu no deseño dun sistema de catro guindastres capaces de manipular aneis de formigón con alta precisión e sincronización, garantindo a seguridade en todo momento.
📦 Compoñentes do sistema
Sensores:
- 4 encoders redundantes (un por guincho): proporcionan unha lectura precisa da posición, o que permite un posicionamento milimétrico e un equilibrio dinámico entre os guinchos (cunha desviación máxima de ±30 mm).
- 4 Sensores de par : miden a carga individual en cada guincho, garantindo que non se superen os límites mecánicos definidos. Redundante por razóns de seguridade.
- 4 Interruptores de límite de desenrolamento máximo : impiden que o cable se desenrole excesivamente, bloqueando automaticamente o descenso.
- 4 Interruptores rotatorios de enrolamento máximo : detectan o límite superior, evitando sobrecargas en dirección ascendente.
Actuadores:
- Distribuidor hidráulico Danfoss
- 4 guinchos controlados independentemente
Interface home-máquina:
- Radiocontrol HBC con pantalla, modos de funcionamento (manual, semiautomático, automático) e axustes configurables.
- Parada de emerxencia inferior e caixa de descenso (con alimentación SAI).
Central de control:
- PLC Siemens ET200SP
- Receptor de radiocontrol
🔍 Funcionamento dos elementos do sistema
Unha vez identificados os compoñentes principais do sistema, pasaremos a detallar o funcionamento de cada un. Para iso, primeiro analizaremos os sensores , despois os actuadores e, finalmente, os elementos de interacción home-máquina (HMI) .
🔧 Sensores
O sistema conta con sensores esenciais para monitorizar e controlar con seguridade o movemento do guincho. Cada un dos seguintes dispositivos instálase individualmente por guincho (é dicir, catro unidades en total):
- Encoders redundantes : estes sensores proporcionan a posición exacta do cable ata o milímetro. Esta información é esencial para acadar posicións predefinidas e manter o equilibrio entre os catro ganchos, cunha tolerancia máxima de ±30 mm. A redundancia destes sensores garante o cumprimento das normas de seguridade, garantindo que a referencia de posición do sistema nunca se perda.
- Sensores de par : Estes miden a carga individual soportada por cada guincho, evitando así sobrecargas tanto nos ganchos individuais como en todo o conxunto do guincho. Tamén son dispositivos redundantes, o que reforza a fiabilidade do sistema.
- Interruptores de límite de desenrolo máximo : detectan cando o cable alcanzou a súa extensión máxima. Cando se produce esta condición, o sistema bloquea automaticamente a válvula de descenso para evitar danos ou riscos.
- Interruptores rotatorios de enrolamento máximo : detectan cando o cable está completamente enrolado. Se se alcanza esta condición, o movemento ascendente do guincho correspondente bloquéase, protexendo o sistema dun esforzo excesivo.
👨✈️ Interface home-máquina (HMI)
O sistema está deseñado para proporcionar unha interface segura e funcional entre o operador e a máquina. Os elementos da HMI inclúen:
📡 Radiocontrol
O control por radio permite o funcionamento remoto e intuitivo do sistema. As súas principais funcións son:
- Modos de funcionamento :
- Inicio : descenso completo ao nivel do chan.
- AutoPosition : ascender a unha posición memorizada.
- Manual : Control independente de cada guincho, limitado só polos interruptores de límite superior e inferior.
- Semiautomático : Permite o movemento sincronizado dos catro guinchos mediante calquera dos joysticks. (Un cada vez).
- Automático : Activa movementos a posicións preconfiguradas, como por exemplo:
En total, pódense configurar cinco posicións diferentes, seleccionables desde a pantalla de configuración do control por radio.
- Modos de velocidade :
- Tartaruga (lenta) e Coello (rápida). A velocidade de funcionamento pódese axustar desde a interface de radiocontrol, adaptándose ás necesidades do entorno e do operador.
- Sistema de parada de emerxencia :
- Inclúe un botón con forma de cogomelo que desconecta o sistema e detén todos os movementos, permitindo só a baixada de emerxencia.
- Sistema de monitorización :
- A pantalla do control por radio proporciona información en tempo real sobre o estado dos interruptores de límite, as cargas actuais, as posicións do guincho e as alarmas activas. O menú de configuración tamén é accesible desde esta interface.
📦 Caixa de seguridade inferior
Este cadro eléctrico, situado na parte inferior do sistema, incorpora:
- Parada de emerxencia : Detén inmediatamente todos os movementos do sistema.
- Sistema de baixada de emerxencia : permite baixar a carga a unha posición segura en caso de corte de enerxía utilizando a enerxía dun SAI.
- Conexión por cable para facer funcionar o sistema en caso de perda de comunicación co control por radio sen fíos.
- Selector de desconexión eléctrica : Permite desconectar completamente a alimentación eléctrica da máquina desde o mesmo panel.
⚙️ Elementos de control adicionais
- Panel de control superior :
- Contén o PLC Siemens e o receptor de radiocontrol .
- Toda a distribución eléctrica, protección, comunicacións e control centralizado do sistema realízanse desde este panel.
- Carrete eléctrico e hidráulico :
- É o responsable de transferir tanto os sinais eléctricos como a presión hidráulica desde a parte móbil á parte fixa do pórtico, garantindo a continuidade operativa e unha comunicación estable durante o movemento do sistema.
🧬 CANopen: Comecemos co protocolo.
Unha vez que entendamos como funciona a máquina, comezaremos co propósito deste artigo, que é como programar e instalar realmente un sistema CANopen. Máis tarde, se che interesa, podo proporcionarche información sobre o control remoto HBC e a súa programación, ou sobre o PLC.
Para comezar a falar de CANopen, creo que é importante saber primeiro que é un protocolo de comunicación baseado en CAN (Controller Area Network) , deseñado para sistemas de automatización distribuída, como maquinaria industrial, vehículos especiais, equipos médicos e sistemas integrados.
🔧 Definición técnica:
CANopen é un protocolo de nivel superior que se executa sobre a rede física CAN, proporcionando unha estrutura estandarizada para:
- Comunicación entre nodos (dispositivos)
- Configuración de parámetros
- Diagnóstico de fallos
- Control en tempo real
📦 Características principais:
- 📚 Emprega unha estrutura chamada Dicionario de obxectos , onde cada nodo ten a súa propia táboa de datos (configuracións, entradas/saídas, estados).
- 📡 Admite tipos de comunicación como:
- PDO (Obxectos de datos de proceso): datos cíclicos en tempo real
- SDO (Obxectos de datos de servizo): configuración e lectura de parámetros
- NMT (Xestión de rede): control do estado do nodo (inicio, parada, reinicio)
- 🧠 Ideal para arquitecturas mestre-escravo ou multi-mestre
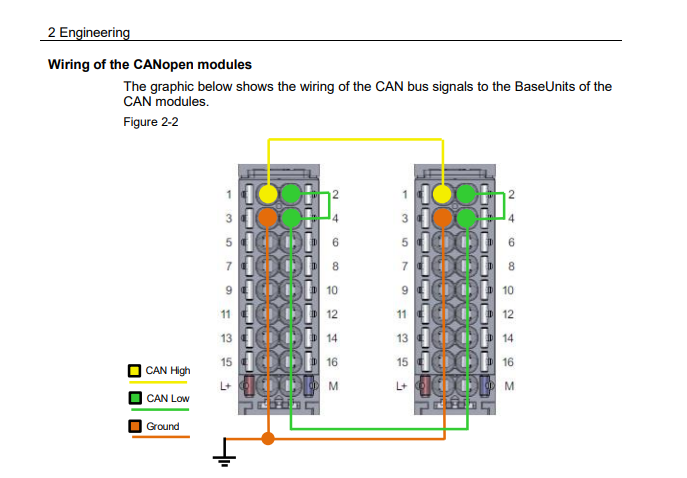
O cableado eléctrico dun sistema CANopen segue as regras físicas do bus CAN, xa que CANopen baséase na rede CAN estándar. Aquí tedes a forma correcta de cablearlo:
🔌 1. Topoloxía recomendada:
- Estrutura de bus lineal (o sistema tamén funciona en forma de estrela, sempre que se faga correctamente).
- Terminadores de 120 Ω en ambos extremos
- Derivacións ≤ 30 cm
|
Nota esquemática: [120Ω]──Nodo──Nodo──Nodo──Nodo──[120Ω] |
⚙️ 2. Cable recomendado:
- Cable de par trenzado blindado
- 2 liñas principais:
- CAN_H (Alto)
- CAN_L (Baixo)
- E unha terceira opcional: GND (referencia de terra común)
Exemplo de cable estándar:
- CAN_H → cor verde
- CAN_L → cor branca
- GND → negro ou ningunha cor específica
📏 3. Lonxitude e velocidade:
|
Velocidade (taxa en baudios) |
Lonxitude máxima do autobús |
|
1 Mbps |
~40 metros |
|
500 kbps |
~100 metros |
|
250 kbps |
~250 metros |
|
125 kbps |
~500 metros |
|
50 kbps |
~1000 metros |
Canto menor sexa a velocidade, maior pode ser a lonxitude do cable.
🛠️ 4. Finais:
- 120 ohmios entre CAN_H e CAN_L en ambos extremos do bus. Como xa comentamos anteriormente.
- Non coloque máis de dúas resistencias de terminación.
- Se só tes un mestre e un escravo, aínda así coloca terminacións en cada extremo.
✅ Resumo das conexións por dispositivo:
Cada nodo debe ter:
- CAN_H
- CAN_L
- GND (opcional, pero moi recomendable)
- Fonte de alimentación (normalmente 24 V CC, dependendo do dispositivo)
Arquitectura do sistema CANopen
A continuación móstrase a táboa cos nodos e os seus respectivos ID de nodo :
|
Dispositivo |
ID do nodo |
|
Codificador Cab1 |
55, 56 |
|
Codificador Cab2 |
65, 66 |
|
Codificador Cab3 |
58, 59 |
|
Codificador Cab4 |
68, 69 |
|
Distribuidor hidráulico |
80 – 85 |
|
Radiocontrol |
1 |
|
PLC (CM Can - Xestor) |
40 |
|
Nota: Unha segunda tarxeta CM Can no PLC funciona en modo «Transparente» , polo que non aparece como un nodo visible na rede. |
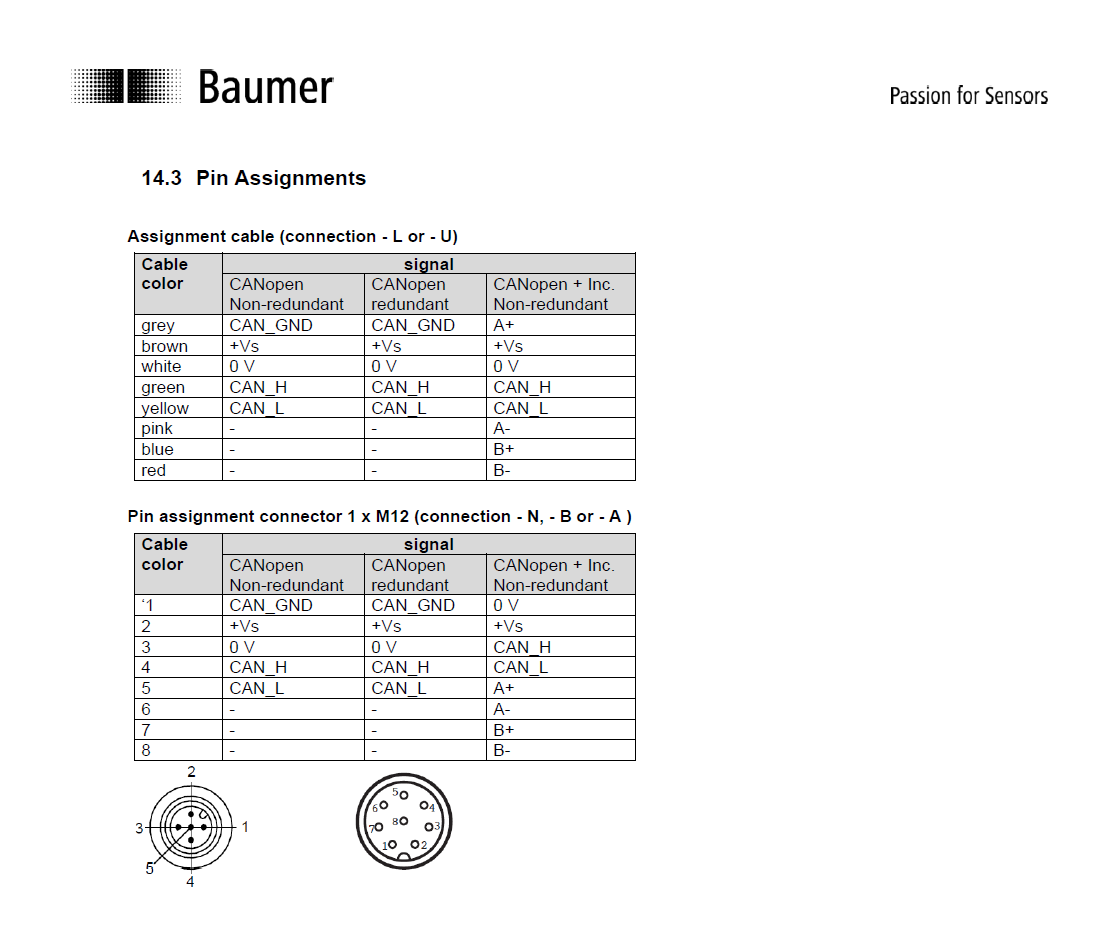
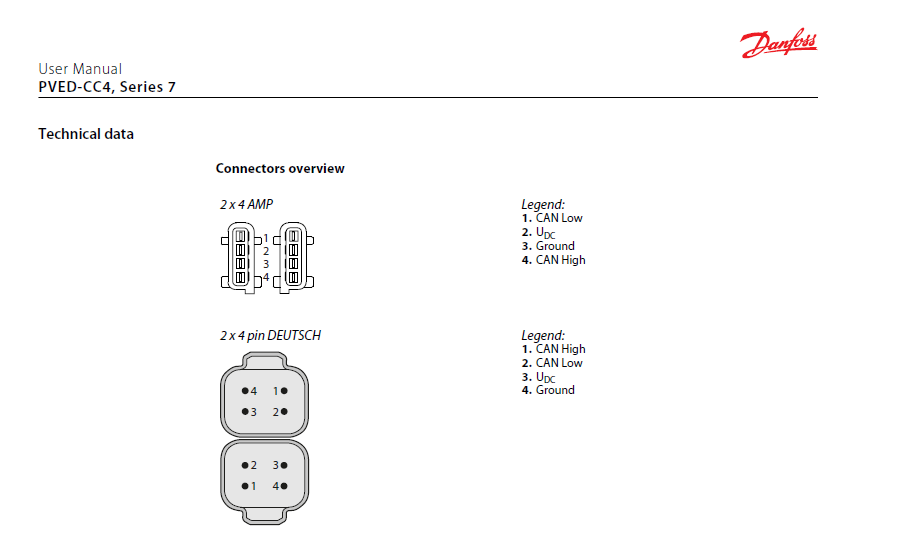
📐 Diagramas de cableado (por fabricante)
Diagramas técnicos proporcionados polos fabricantes.
- Codificador Baumer
- Distribuidor de Danfoss
- Radiomando HBC
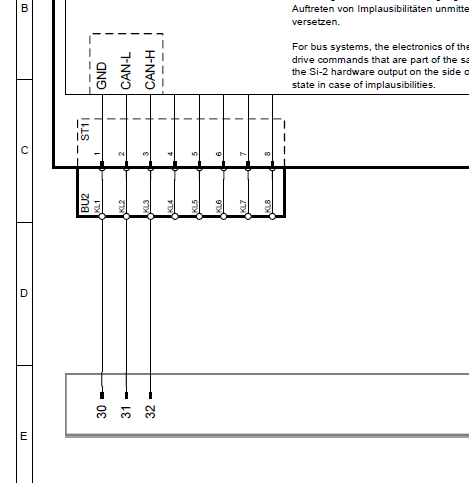
- Módulos Siemens CM Can
Facendo o diagrama completo de conexións eléctricas entre todos os dispositivos conseguiríamos algo semellante ao seguinte:
🌐 Distribución de rede CANopen
 Distribución de rede CANopen
Distribución de rede CANopen
Esta distribución é moi importante porque é a través destes nodos que nos comunicaremos cos dispositivos.
🖥️ Programación do sistema desde o PLC.
Introdución
Agora centrarémonos na programación de PLC. Aínda que abordaremos principalmente este aspecto, tamén discutiremos aspectos clave de configuración para sensores e actuadores.
Unha vez definidos parámetros como a velocidade en baudios, o ID do nodo e a estrutura do PDO , podemos establecer a lóxica de comunicación no PLC.
🧭 Configuración por dispositivo
🔧 Codificador Baumer
- Require unha interface CAN compatible con Baumer Sensor Suite
- Configúranse: ID de nodo, ID de nodo redundante e PDO
- O fabricante proporciona o ficheiro EDS , que facilita a integración automática no sistema. Só é necesario modificar o NodeID e algúns parámetros do PDO.
🔧 Distribuidor de Danfoss
- Só permite modificar o ID do nodo
- Non ten PDO preconfigurados: a comunicación debe facerse mediante mensaxes manuais
|
Exemplo de cambio de ID (de 80 a 81): |
|
001CEF80C8 X 8 $ F9 $ 20 $ 09 $ 00 $ 01 $ 00 $ 09 $ 50 $ 001CEF80C8 X 8 $ F9 $ 61 $ 73 $ 73 $ 77 $ 6F $ 72 $ 64 $ $001CEF80C8 X $8 $F9 $31 $97 $FF $FF $FF $FF $FF $FF 001CEF80C8 X 8 $ F9 $ 20 $ 0 B $ 00 $ 33 $ 00 $ 02 $ 81 $ $001CEF80C8 X $8 $F9 $00 $00 $00 $00 $00 $00 $00 $00 $00 |
Pódese facer co software Danfoss ou cun rastreador CAN.
Os comandos para o control da posición da válvula trataranse máis adiante.
📡 Radiomando HBC
- Dispositivo configurado de fábrica
- Entregado co ID de nodo (por exemplo, 1) e o ficheiro EDS para a integración directa
Neste punto xa configuramos as periferias e podemos pasar ao PLC.
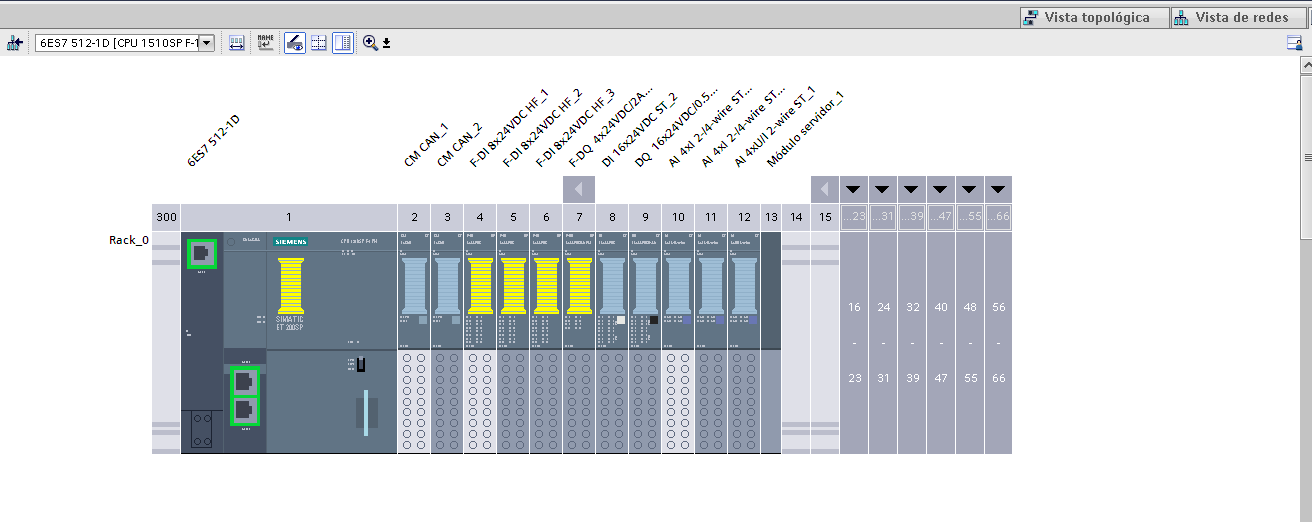
⚙️ Configuración de PLC en redes CANopen
Integración das tarxetas CM CAN Transparent e CAN Manager no TIA Portal
Nesta sección, comezamos cun proxecto configurado previamente (seguridade, lóxica e estrutura xeral). Se precisas máis detalles sobre a arquitectura básica, ampliaremos este tema en futuras entregas.
O equipo de control central é unha unidade de seguridade Siemens ET200SP , con módulos de entrada/saída dixitais e analóxicas e dúas tarxetas de comunicación CM CANopen .
🧩 Tarxeta CM CAN_1: modo transparente CAN
Esta tarxeta utilízase para comunicarse co distribuidor hidráulico Danfoss , que non ten EDS, polo que require programación mediante mensaxes manuais.
|
🔧 Configuración:
|
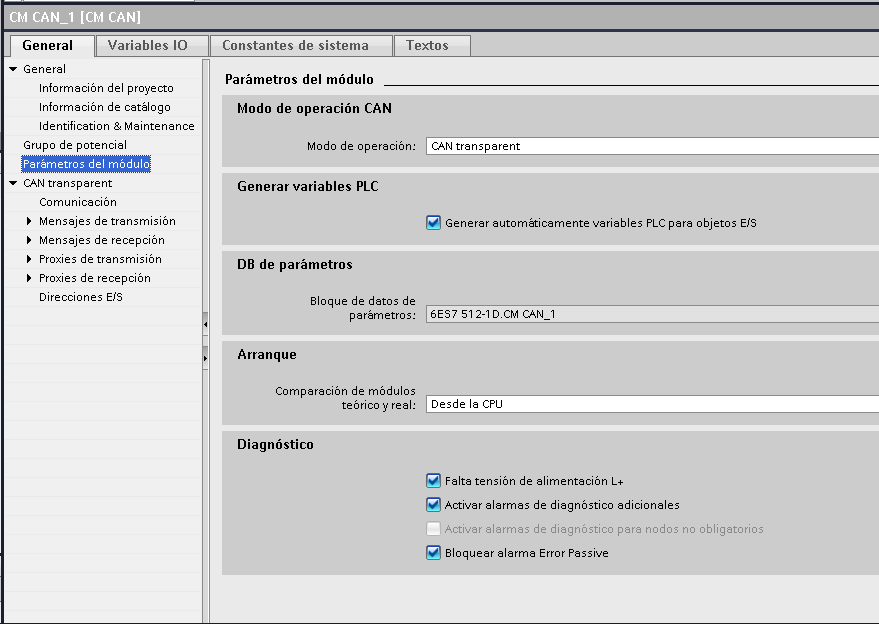 |
As seguintes seccións están activadas ao realizar a configuración anterior:
- Comunicación: Configuración xeral do bus
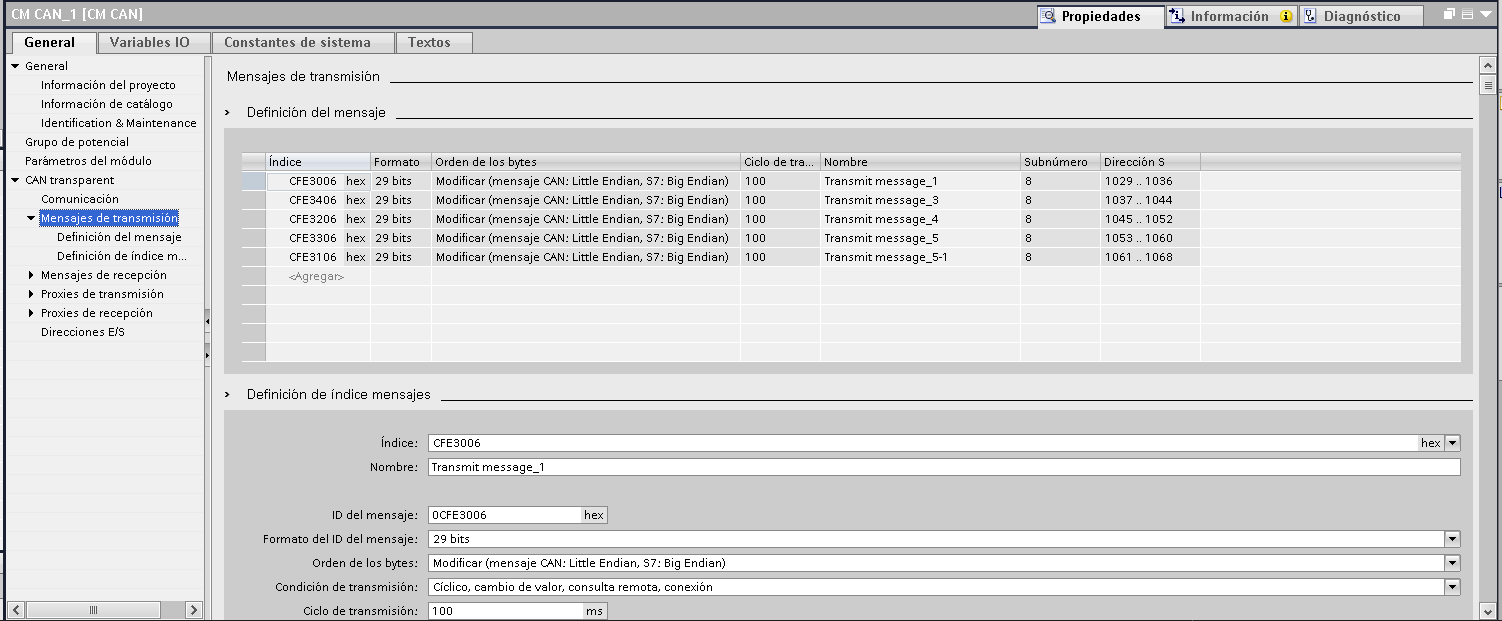
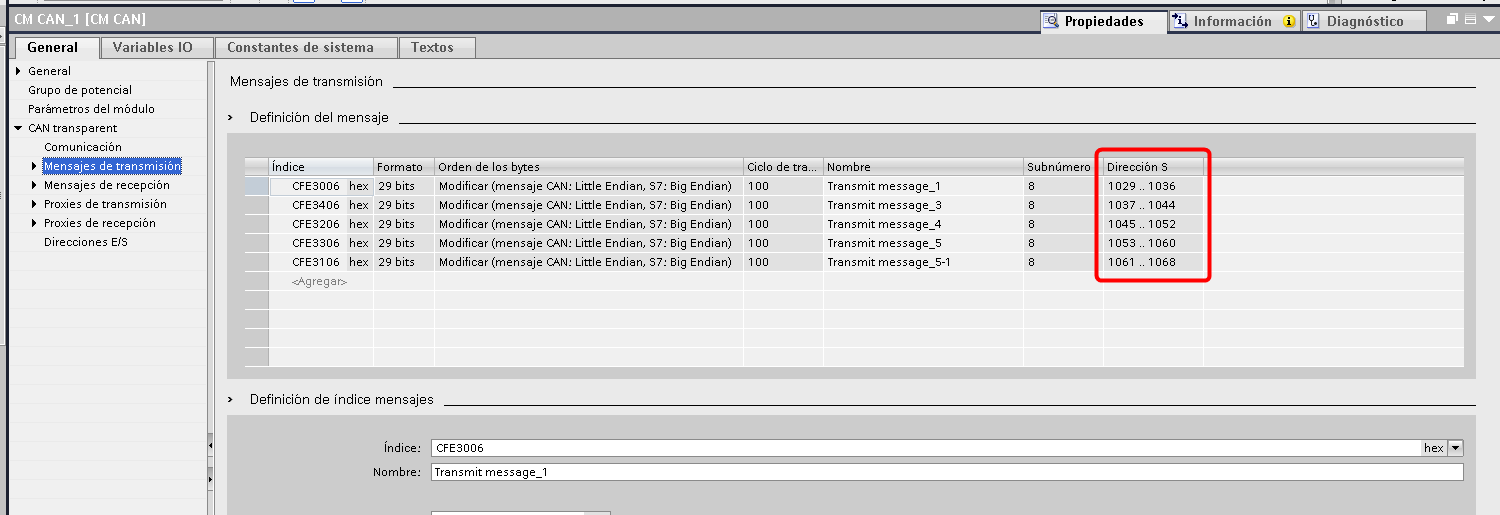
- Mensaxes de difusión: comandos para operar as válvulas
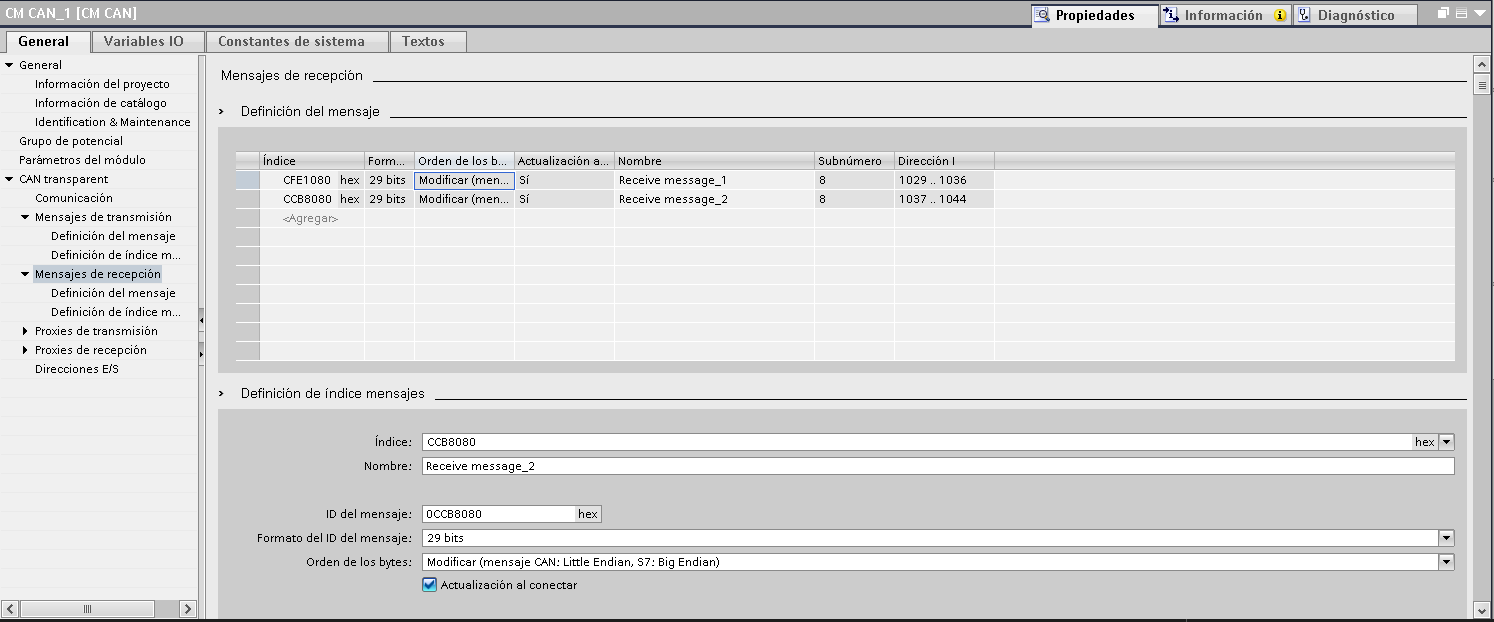
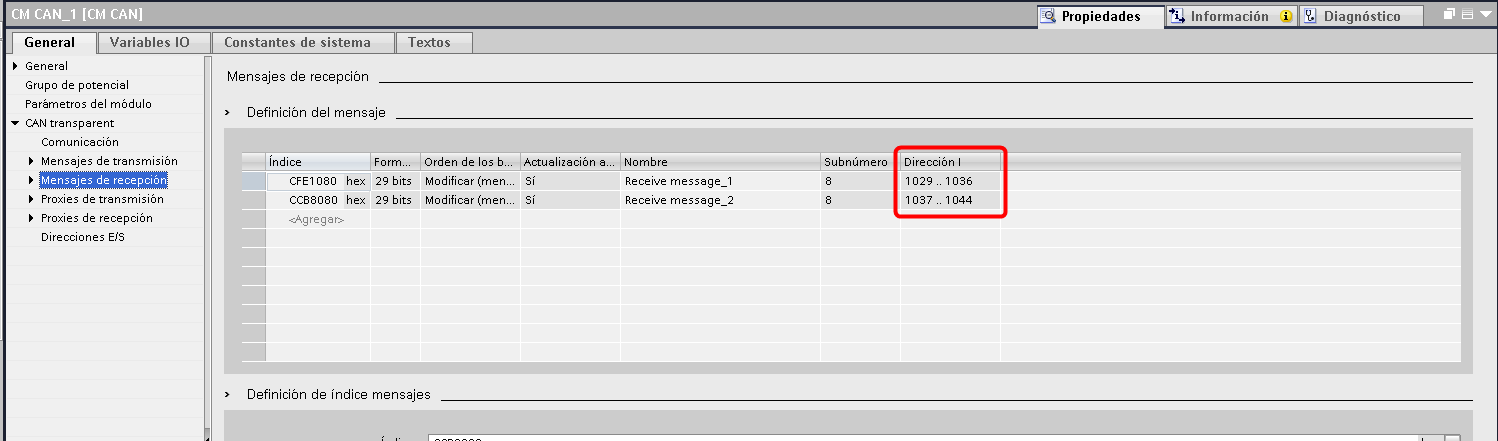
- Mensaxes de recepción: erros de lectura, posición e estado
- Proxies: non se usan neste caso
No modo transparente , o módulo non aparece como un nodo na rede , senón que actúa como un "espía invisible".
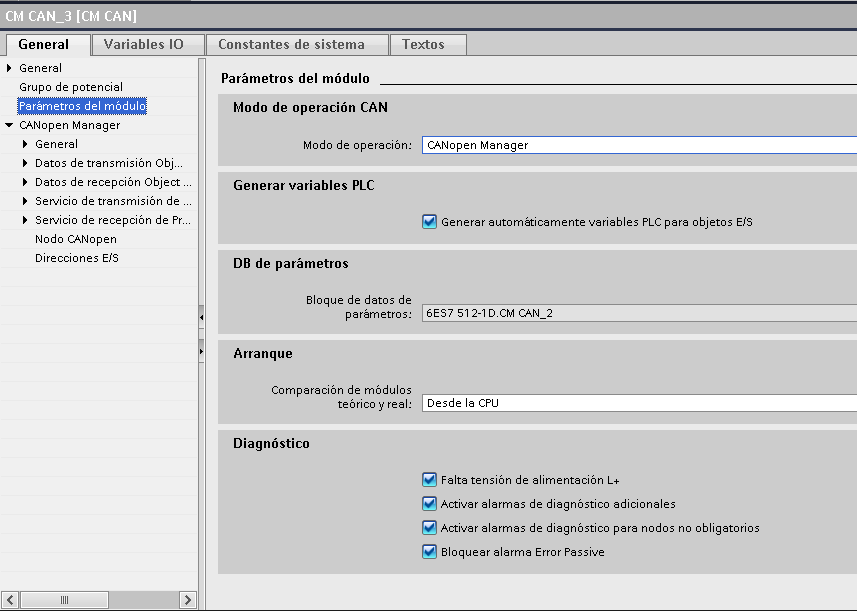
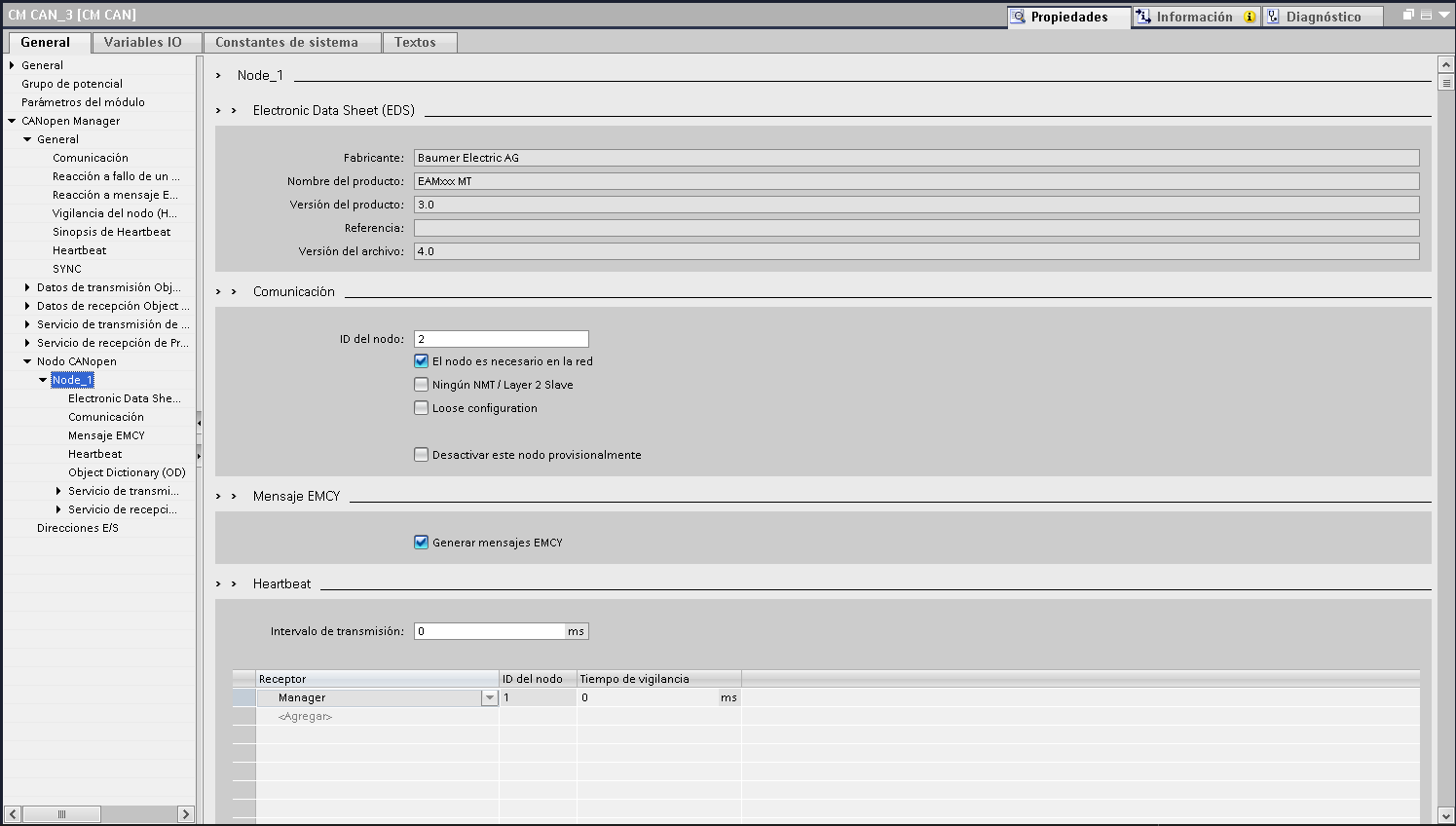
📡 Tarxeta CM CAN_2: modo de xestor CAN
Esta segunda tarxeta conéctase aos encoders e ao radiocontrol HBC , o que permite o uso dos ficheiros EDS do fabricante e a integración mediante PDO.
⚙️ Configuración:
|
 |
📥 Integración do nodo EDS
- Na sección Nó CANopen , faga dobre clic en <Engadir>
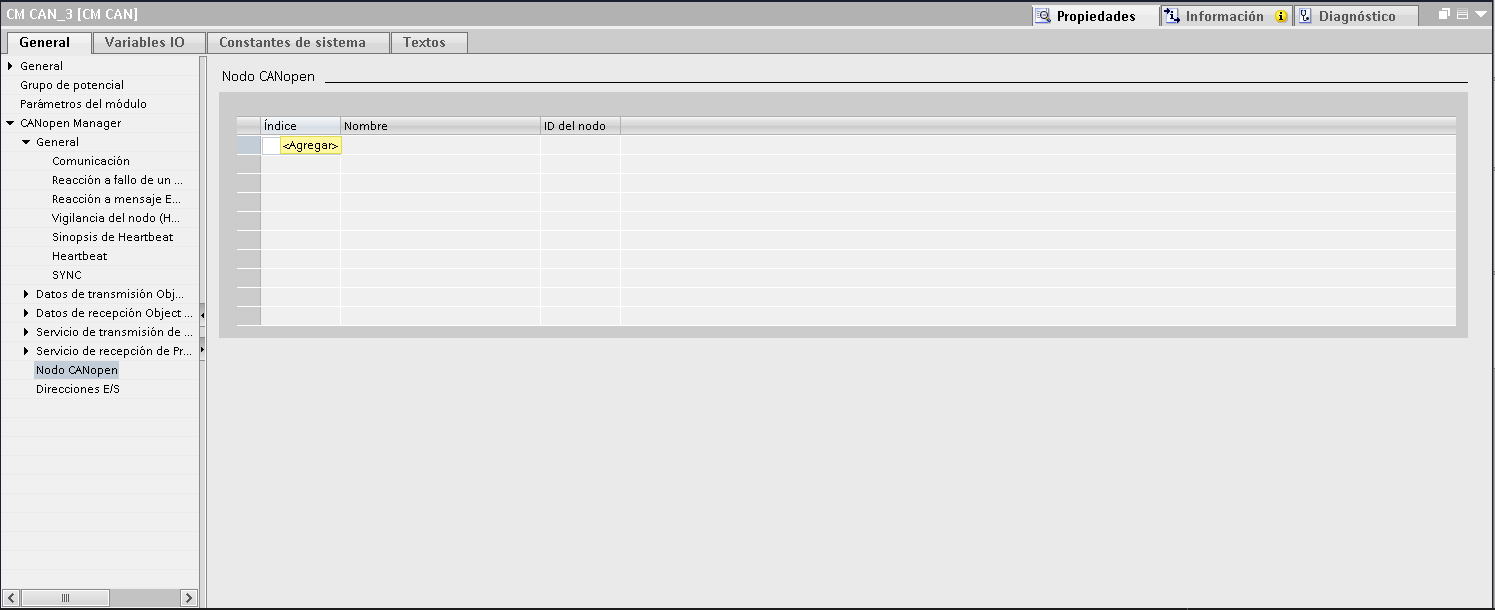
- Importar o ficheiro EDS proporcionado polo fabricante
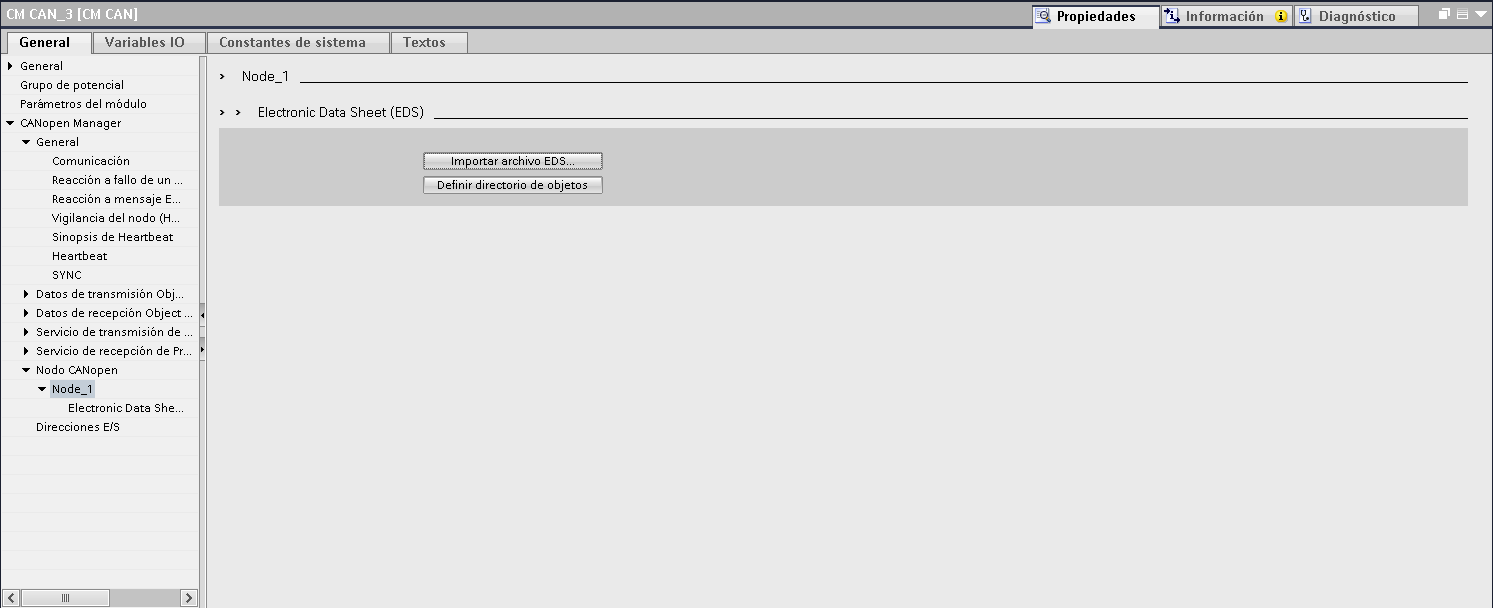
- Renomear cada nodo para identificar a que dispositivo pertence
- Configurar os valores cargados previamente co software do provedor
Dado que os codificadores son redundantes, necesitarás dous nodos por guincho.
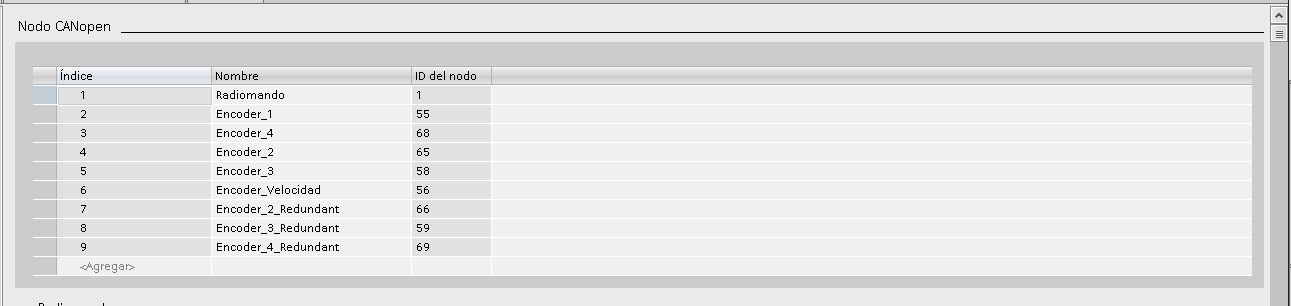
Resumo de todos os nodos configurados.
🔄 Configuración de PDO
Para cada nodo, os PDO que queiras usar deben estar activados e configurados.
- Servizo de transmisión de PDO: lectura de datos de sensores
- Servizo de recepción de PDO: escritura de datos desde o PLC
🧠 Consello: Pensa dende a perspectiva do dispositivo. Está enviando ou recibindo ?
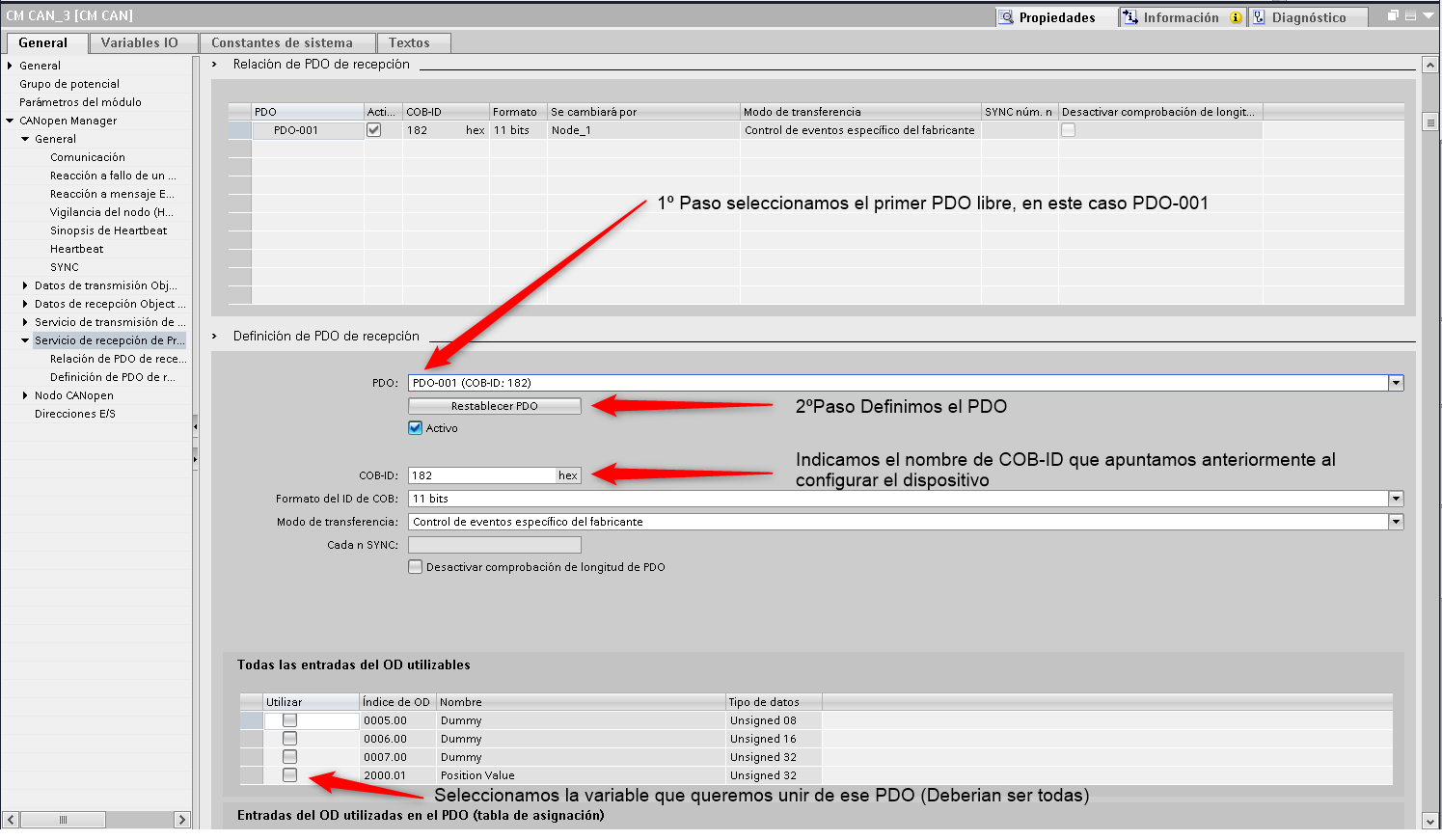
📌 Exemplo práctico: configuración da recepción desde un codificador
- Activar PDO no dispositivo
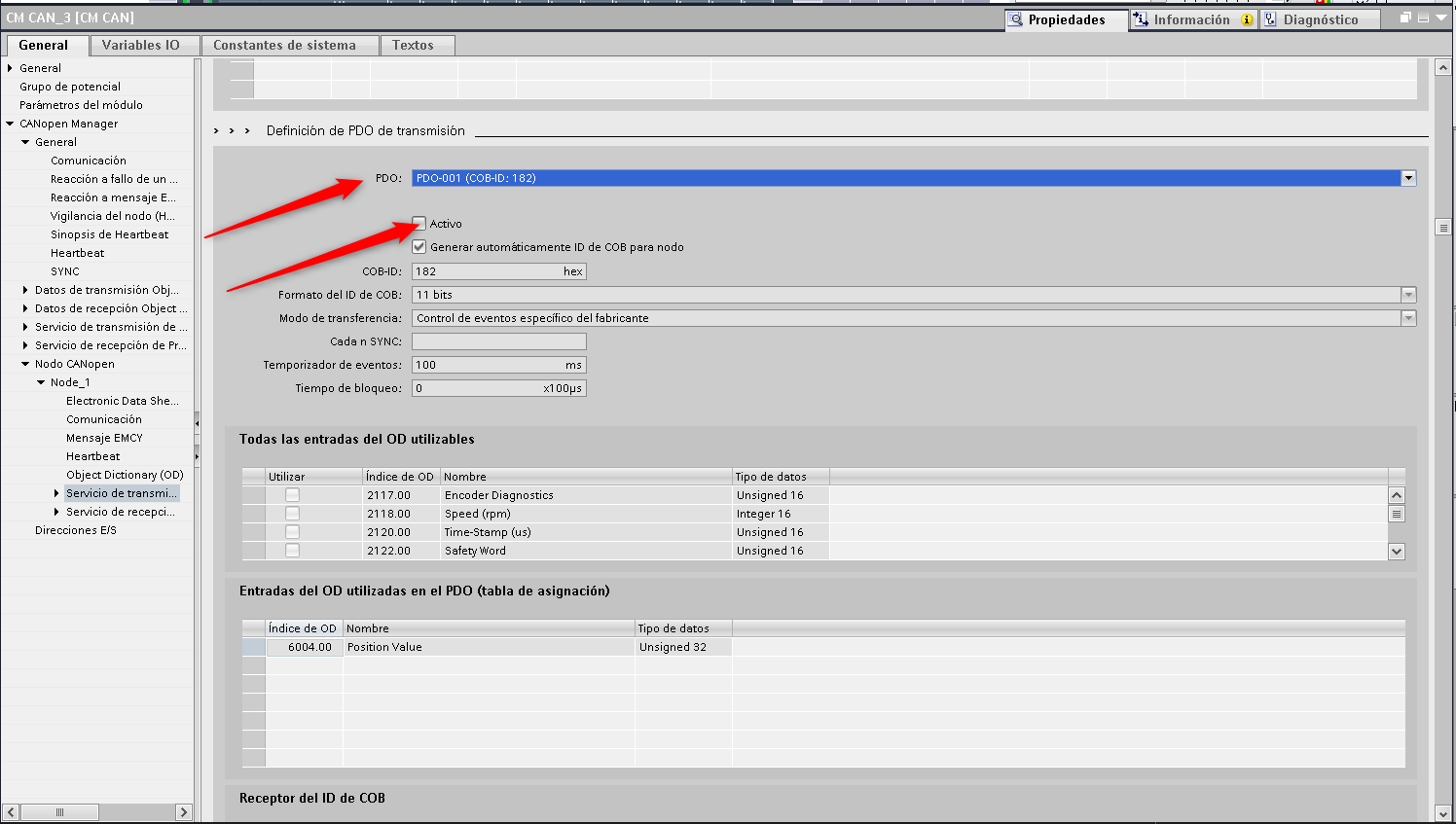
- Anota o COB-ID (o noso caso 182)
- Ir aos datos de recepción de PDO
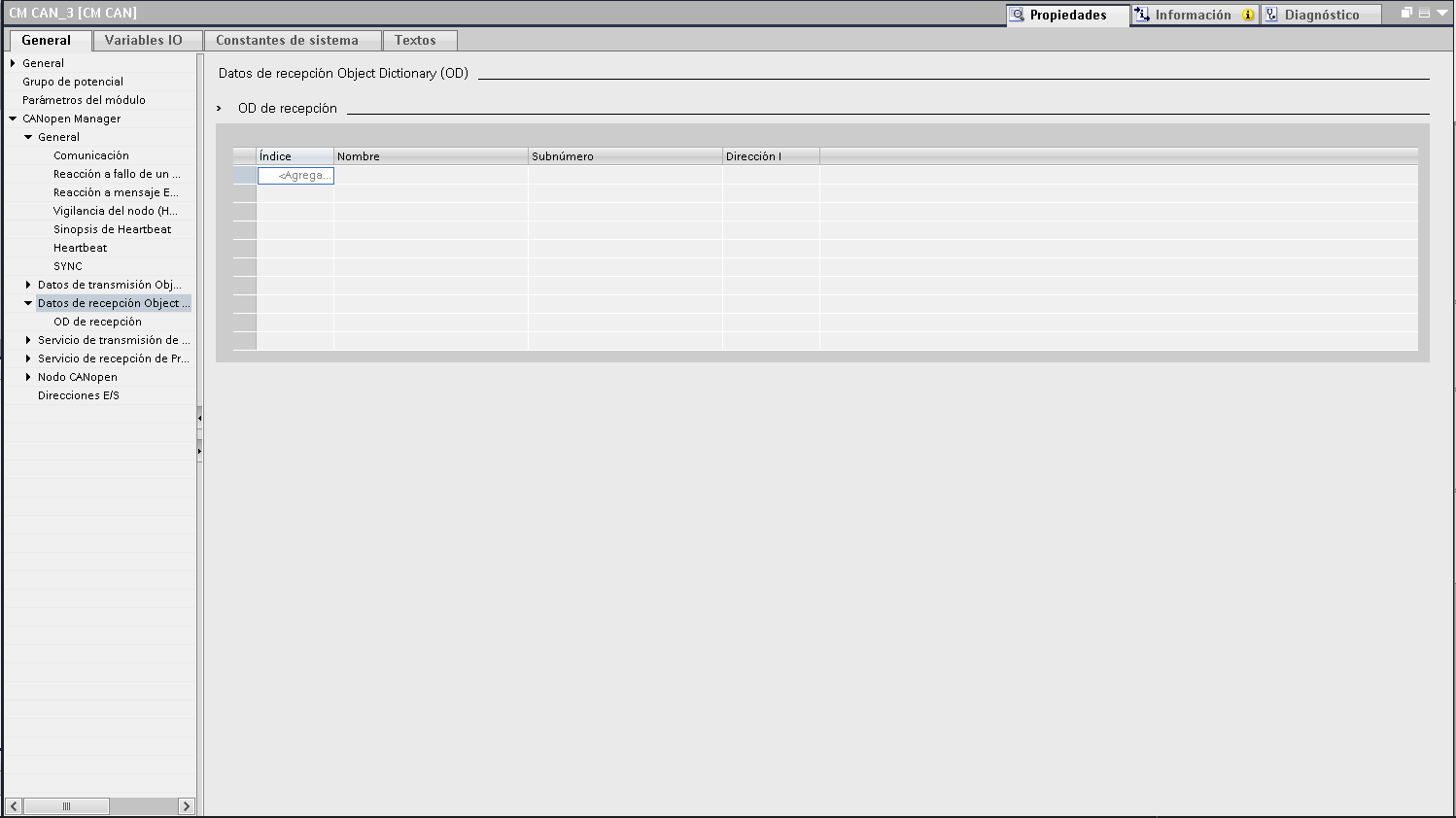
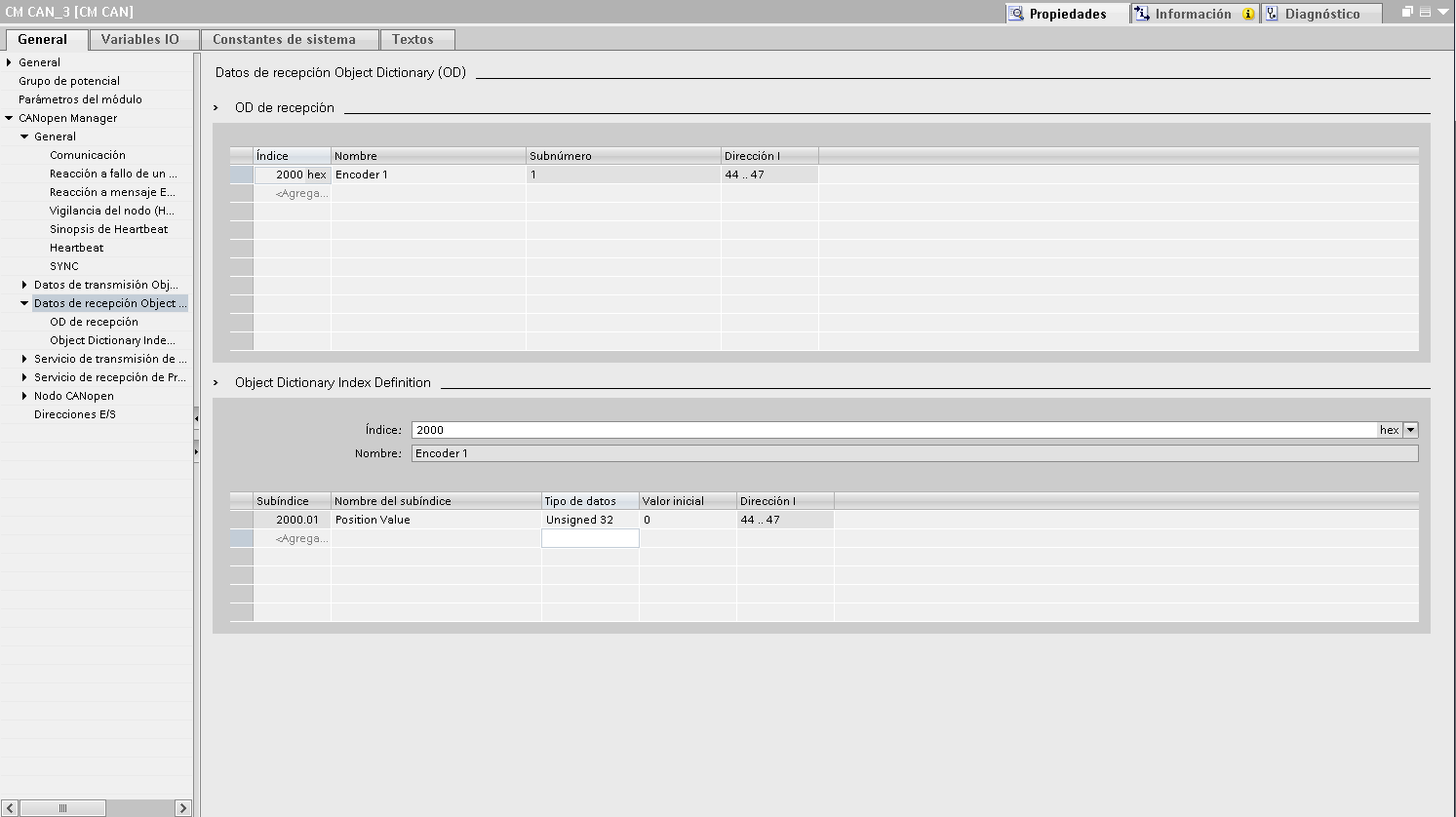
- Fai clic en <Engadir> e renomea o obxecto
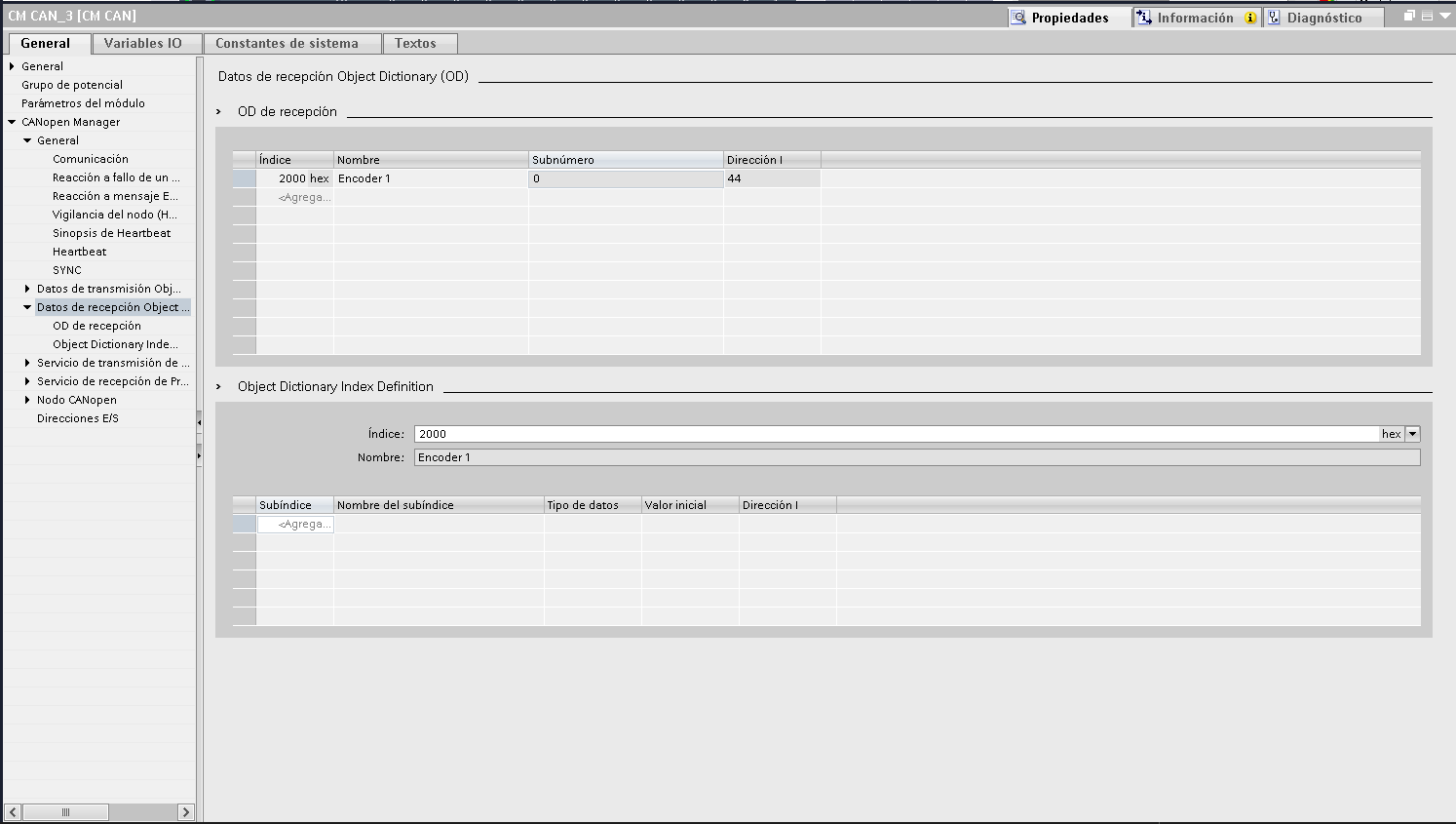
- Engadir variables de sensor
- Ir ao servizo de recepción de PDO
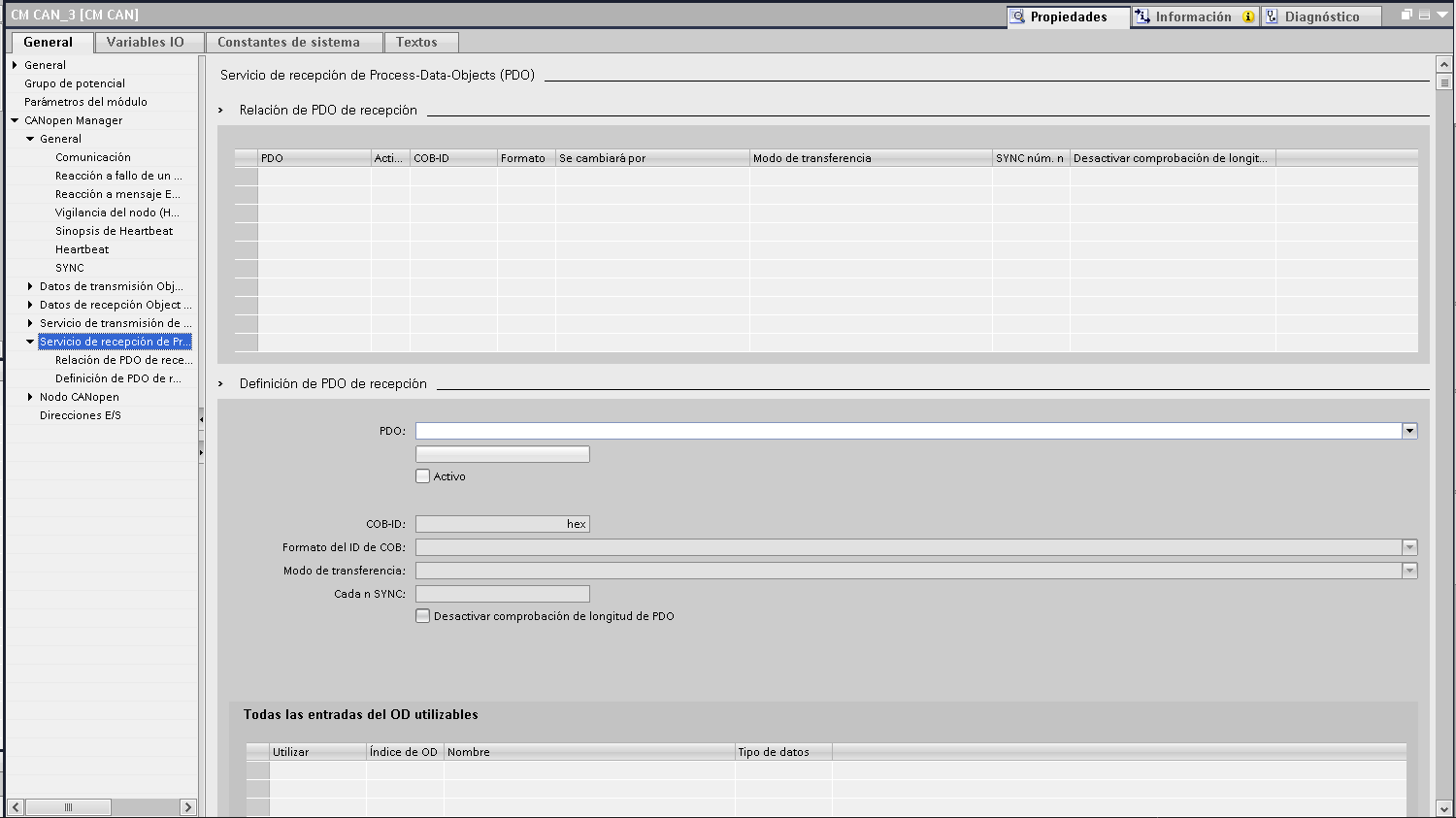
- Crea un novo PDO e vínculao ao COB-ID (o noso caso 182)
Este proceso repítese para cada dispositivo e enderezo de intercambio.
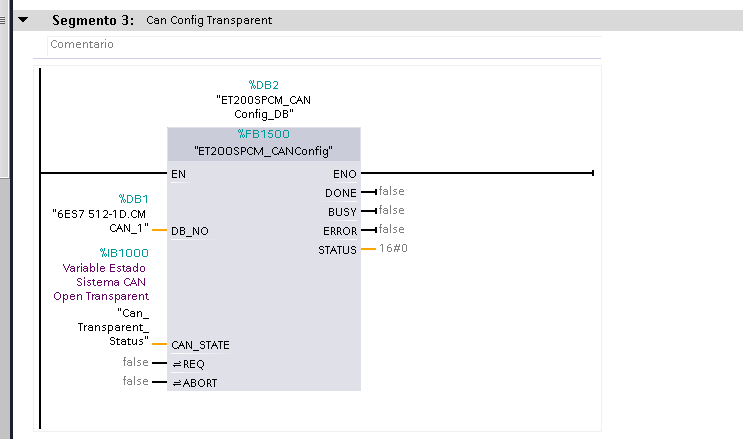
▶️ Execución e activación no ciclo do programa
Tarxeta CM CAN_1 (Transparente)
- Para activar: escribe 1 no enderezo QB1000
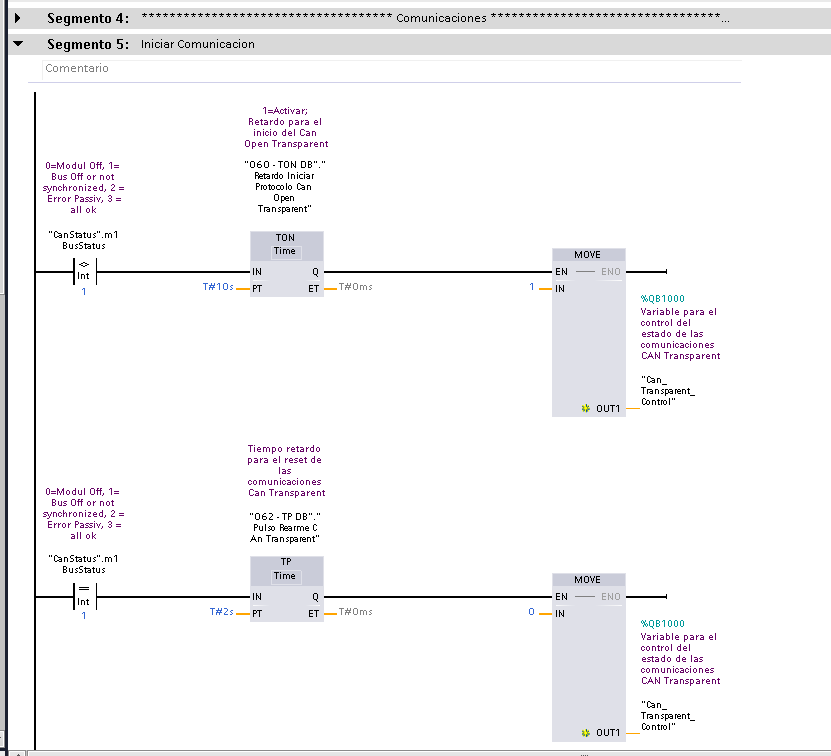
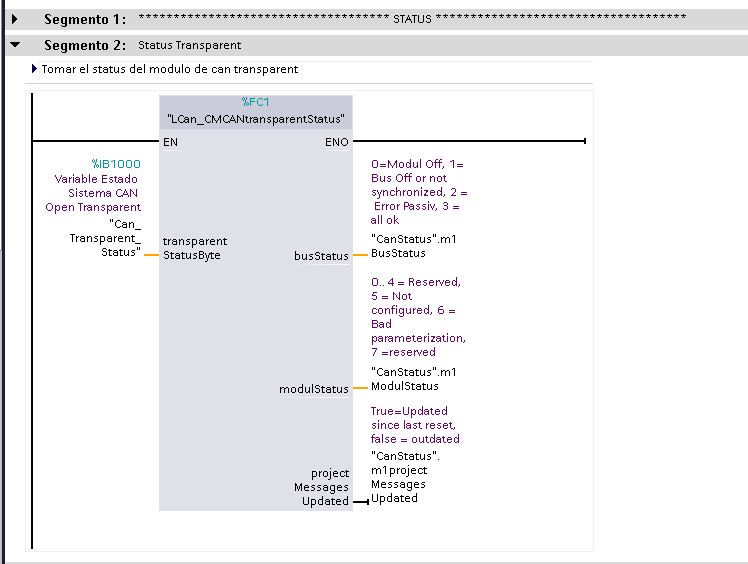
- Estado da tarxeta mediante o byte de estado:
- 0 = Módulo desconectado
- 1 = Bus desactivado / non sincronizado
- 2 = Erro pasivo
- 3 = Todo correcto
- Onde localizar os enderezos de entrada e saída
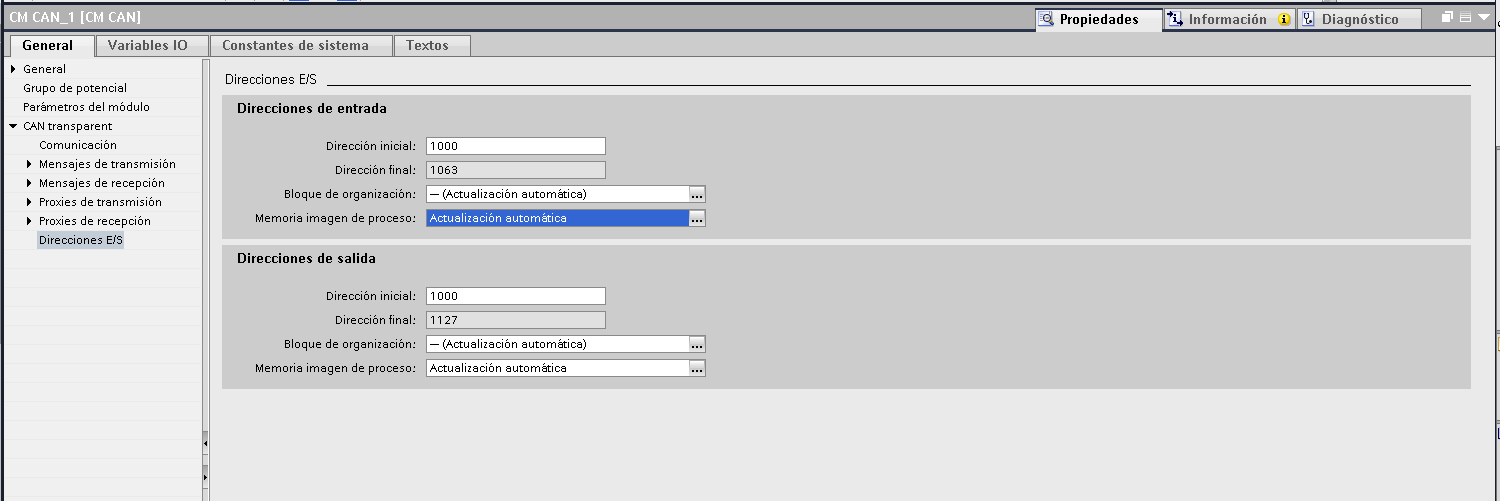
- Saídas
- Entradas
Tarxeta CM CAN_2 (Xestor)
- Activación: escribir 16#05 (hexadecimal) en QB94
As entradas e saídas asociadas pódense ver na configuración de E/S do proxecto, así como na tarxeta CAN transparente.
🚨 Non te comunicas? Ferramentas de diagnóstico
Non te preocupes! Se aínda non podes comunicarte despois de configurar todo, non estás só.
Aquí entra en xogo o uso dun rastreador CAN , esencial para depurar problemas en redes industriais.
🧪 Ferramentas recomendadas:
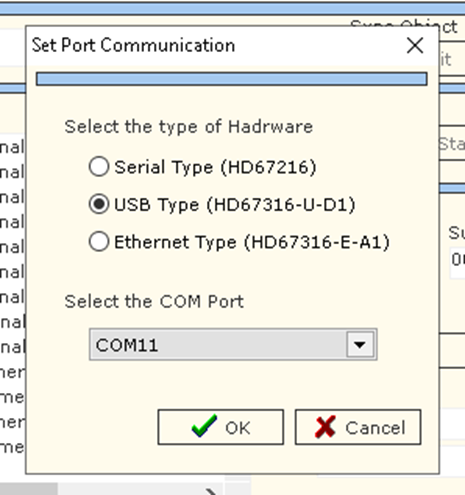
- HD67316-U-D1 – Analizador CAN
adfweb.com/products/CAN_BUS_analyzers.asp
✔️ Precisión profesional, alta fiabilidade - Adaptador USB a CAN STM32 (Waveshare)
waveshare.com/product/usb-can-a.htm
✔️ Económico y versátil
🛠️ Como se usa o analizador CAN?
|
 |
Pasos clave:
- Comprobe o porto COM no Xestor de dispositivos
- No software, vaia a: Función > Definir porto
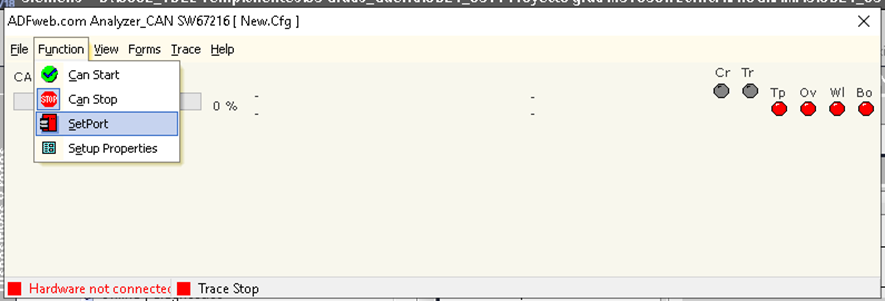
- Configura o porto COM correcto
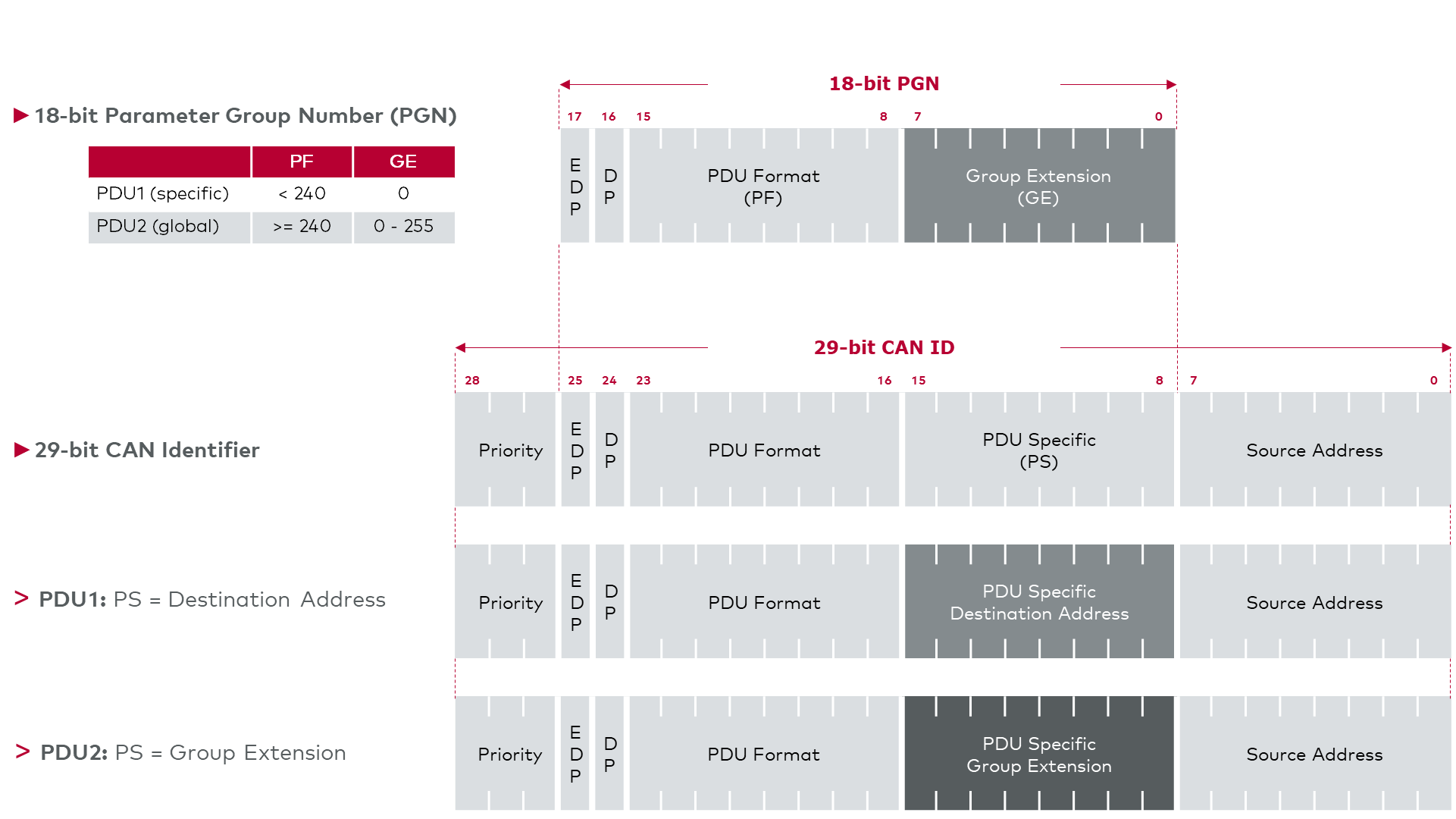
🧾 Estándar ou ampliado? Identificadores CAN e erros comúns
A comunicación CAN pode funcionar en dous formatos de identificador:
- Estándar (11 bits)
- Estendido (29 bits)
No TIA Portal, esta configuración faise na sección de configuración do nodo ou da mensaxe, na opción "Formato de ID da mensaxe" . Este valor define a lonxitude do identificador que se utilizará nos telegramas CAN.
⚠️ Se configuras o sistema nun formato e o sniffer noutro, non verás ningún tráfico , mesmo se realmente existe. Este é un dos erros máis comúns e frustrantes ao depurar unha rede CANopen.
Por iso é fundamental que o rastreador estea configurado co mesmo formato (estándar ou estendido) que se usa no proxecto. Se non, pensarás que "non hai comunicación" cando simplemente non estás a ler o formato correcto.
🛠️ Como configurar o teu rastreador CAN para que funcione en modo estándar ou ampliado
⚙️ Paso 1: Selecciona o modo de identificación (Estándar ou Ampliado)
- Vaia a Función > Configurar propiedades .
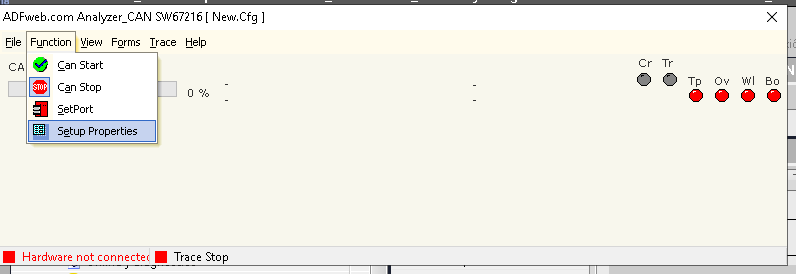
- Localiza o parámetro "Protocolo" .
- Escolle entre:
- Estándar (identificador de 11 bits)
- Estendido (identificador de 29 bits)
|
🧠 Consello: Se non sabes cal estás a usar, compróbao no software do teu PLC (TIA Portal). Para cada nodo ou mensaxe, podes ver se se está a usar un ID de 11 bits ou de 29 bits . |
📶 Paso 2: Axusta a velocidade (Tasa en baudios)
Na mesma pantalla de configuración:
- Axuste a velocidade de transmisión á mesma que a da súa rede CANopen.
- Exemplo típico: 250000 ou 125000 bps (o noso caso é de 250 kbit/s)
▶️ Paso 3: Comeza a escoitar
- Fai clic en Comezar ou Comezar a cheirar .
- Verás o tráfico CAN en tempo real se todo está configurado correctamente.
Se non ves nada: Comproba o modo de identificación, a velocidade e as conexións de alimentación. Ademais, comproba que a rede estea activa.
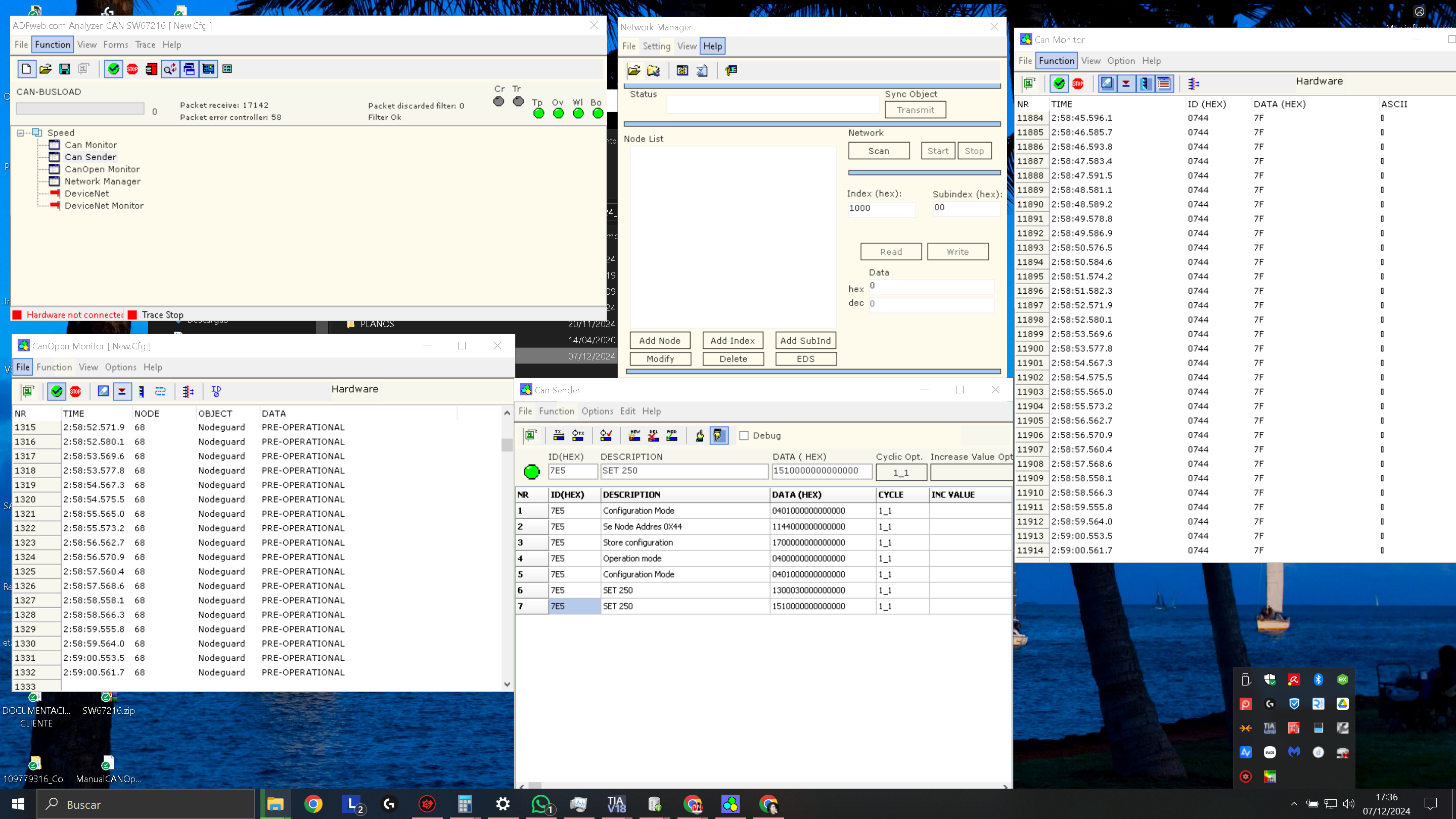
|
🧠 Consello: Lembra que na sección «Formularios» podes abrir diferentes xanelas onde podes ver a comunicación en varios formatos. |
🧠 Conclusión
Este artigo non só pretende presentar o protocolo CANopen desde unha perspectiva técnica, senón tamén mostrar como se integra en sistemas de automatización industrial do mundo real . O uso deste protocolo permitiunos implementar un sistema robusto, eficiente e seguro en condicións esixentes, optimizando tanto o tempo de instalación como o de mantemento.
Interésache o seguinte artigo centrado na programación do control remoto HBC ou no uso avanzado do PLC Siemens ET200SP en redes CANopen?
Que queres ver no seguinte artigo?
📡 Programación avanzada do control remoto por radio HBC
🔧 Xestión de erros e monitorización de rede en CANopen industrial
🧠 Outros intereses
Ligazóns de interese:
|
Exemplo de portal Tia |
Exemplo de portal Tia (hardware) |
Documentación de sensores |
Data de publicación: 25/06/2025