Simulación 6 con KUKA Sim Pro, Desprazamento de obxectos e soldadura.
Programación de robots industriais Off-Line.
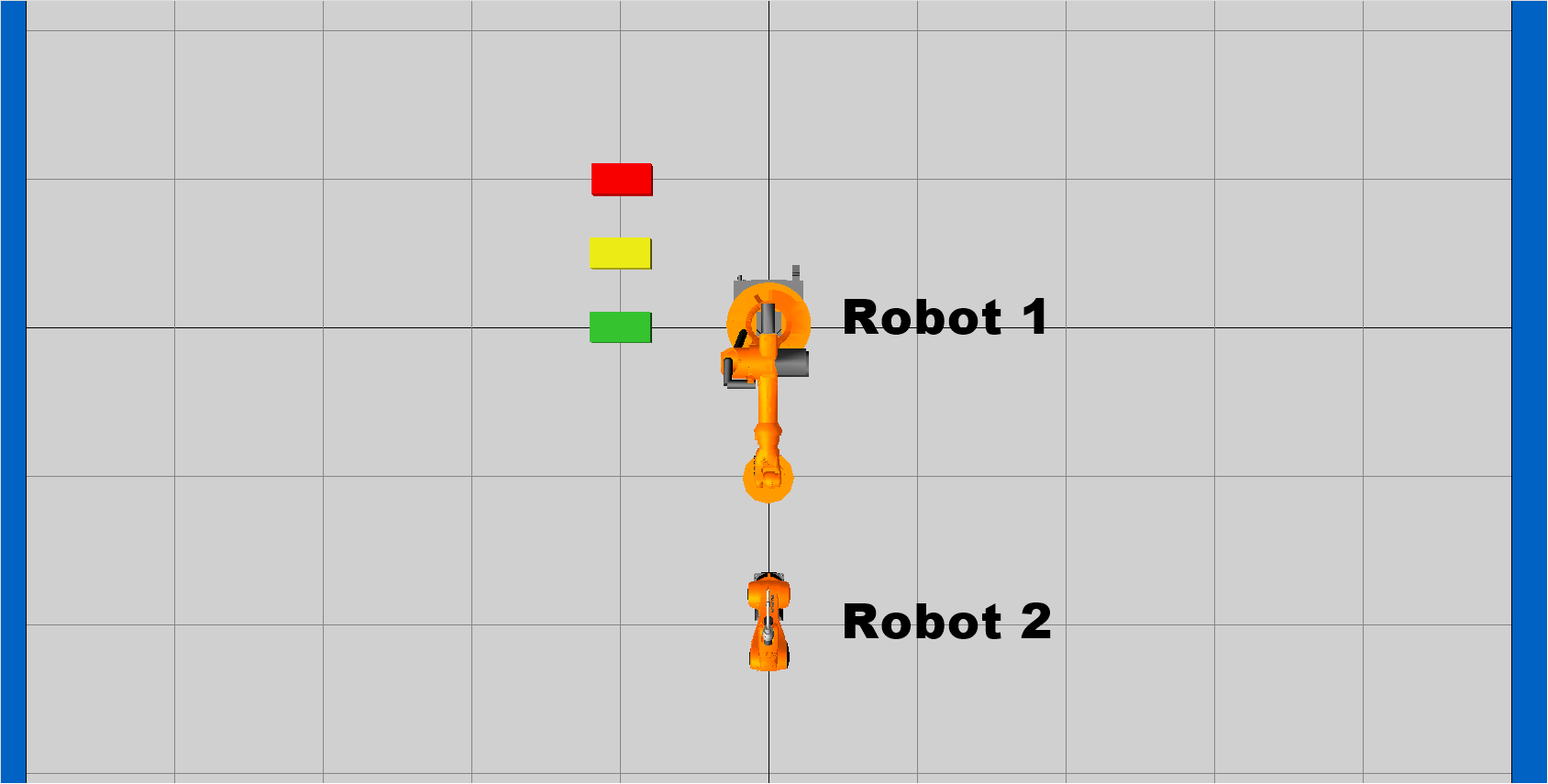
- O robot 1 colle do chan as pezas a soldar e posiciónaas nos diferentes lugares de traballo .
- O robot 2 encárgase de soldar as pezas.
| Obxecto | X | Y | Z | Descargar Componentes | A | B | C |
| Robot 1 | 0 | 0 | 0 | Componente Robot | 0 | 0 | 0 |
| Robot 2 | 1750 | 0 | 0 | Componente Robot | 0 | 0 | 0 |
| Bloque Rojo | -990 | -990 | 0 | Componente Bloque Rojo | 0 | 0 | 0 |
| Bloque Amarillo | -500 | -990 | 0 | Componente Bloque Amarillo | 0 | 0 | 0 |
| Bloque Verde | 0 | -990 | 0 | Componente Bloque Verde | 0 | 0 | 0 |
Links de Interese:
 |
|
 |
Data Publicación: 02/12/2020