Programación 2 ABB.
Aprender Linguaxe RAPID, poderemos programar desde RobotStudio, ou desde a FlexPendant.
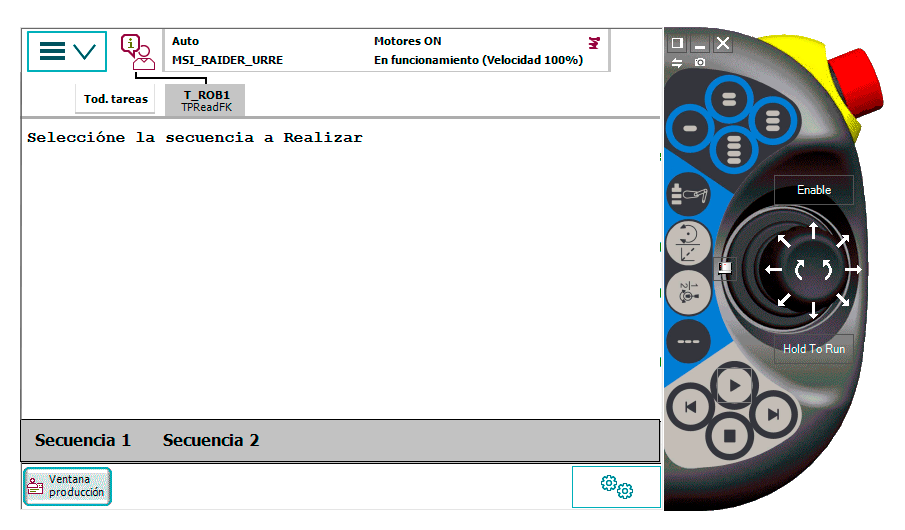
- Instrución TPReadFK; Mostrará na pantalla de operador unha mensaxe con distintas opcións de resposta. TReadFK encárgase de ler as teclas de función da programadora, en primeriro lugar indicaremos a variable na cal gardaremos a resposta, a continuación indicaremos o texto que se mostrará na pantalla, por ultimo temos 5 StEmpty cos que xogaremos para ir activando ou desactivando botóns. Se os deixamos por defecto no se mostrará ningún botón, se queremos mostrar un botón substituiremos ese texto polo nome que lle queremos dar ao noso botón, como veremos no exemplo. O formato desta instrución é :
TPReadFK <Variable>, "Texto a mostrar na pantalla", StEmpty, StEmpty, StEmpty, StEmpty, StEmpty; - Exemplo usando esta instrución TPReadFK; Se quere realizar o exemplo pode tomar como base o exercicio Programación 1 ABB:
MODULE Module1 CONST robtarget Target_10:=[[547.330665099,0,451.64730631],[0.190808996,0,0.981627183,0],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; CONST robtarget Target_20:=[[579.997326386,-300.000184257,-0.002460883],[0.00007062,0.000000176,-0.999999998,0.000000105],[-1,1,-2,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; CONST robtarget Target_30:=[[580.000005471,300.000017813,-0.000058921],[0.000070808,0.000000206,-0.999999997,0.000000106],[0,-1,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; CONST robtarget Target_20_2:=[[580.004388386,-300.000173756,49.997538618],[0.00007062,0.000000176,-0.999999998,0.000000105],[-1,1,-2,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; CONST robtarget Target_30_2:=[[580.007086271,300.000028414,49.999940578],[0.000070808,0.000000206,-0.999999997,0.000000106],[0,-1,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; CONST robtarget Target_50:=[[339.99,300,0],[0.014306426,0.021153167,0.999670738,0.002507023],[0,-1,1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; CONST robtarget Target_50_2:=[[339.99,300,50],[0.014306426,0.021153167,0.999670738,0.002507023],[0,-1,1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; CONST robtarget Target_40:=[[589.999996765,300.000000063,-0.000079507],[0.014305147,0.021155022,0.999670717,0.002507207],[0,-1,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; VAR Num Numero := 0; !*********************************************************** ! ! Módulo: Module1 ! ! Descripción: ! <Introduzca la descripción aquí> ! ! Autor: Carlos Urrestarazu ! ! Versión: 1.0 ! !*********************************************************** !*********************************************************** ! ! Procedimiento Main ! ! Este es el punto de entrada de su programa ! !*********************************************************** PROC main() TPErase; TPReadFK Numero,"Seleccione la secuencia a Realizar ", "Secuencia 1", "Secuencia 2",stEmpty,stEmpty,stEmpty; IF Numero = 1 THEN TPWrite "Soldando Derecha"; MoveJ Target_10,v1000,fine,MyTool\WObj:=wobj0; MoveJ Target_20_2,v1000,fine,MyTool\WObj:=wobj0; MoveJ Target_20,v1000,fine,MyTool\WObj:=wobj0; MoveJ Target_20_2,v1000,fine,MyTool\WObj:=wobj0; ELSEIF Numero = 2 THEN TPWrite "Soldando Izquierda"; MoveJ Target_30_2,v1000,fine,MyTool\WObj:=wobj0; MoveJ Target_30,v1000,fine,MyTool\WObj:=wobj0; ENDIF MoveJ Target_10,v1000,fine,MyTool\WObj:=wobj0; !Añada aquí su código ENDPROC ENDMODULE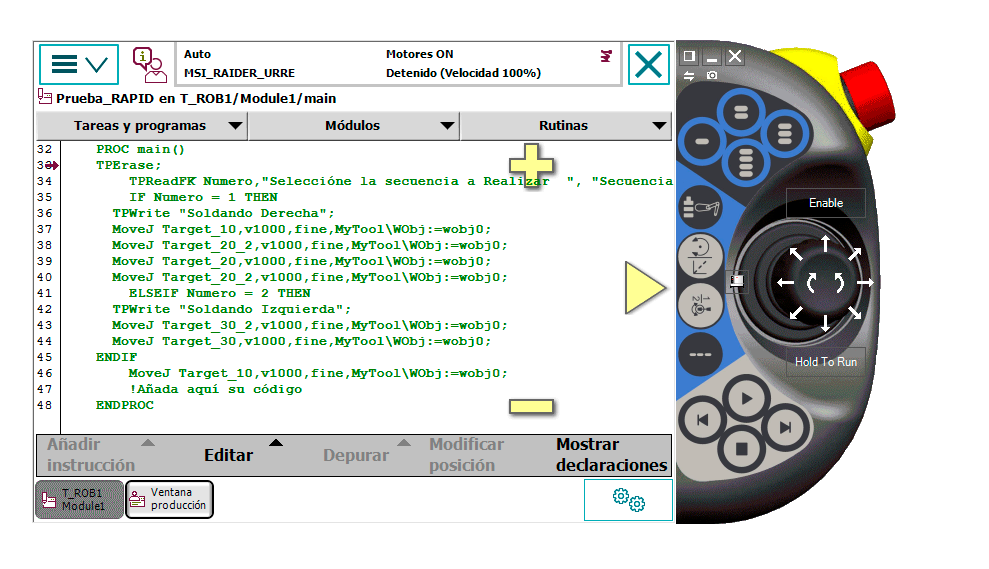
Links de Interese:






Data Publicación: 29/01/2021