Simulación 4.0 con RobotStudio ABB, FlexPendant.
Programación de robots industriales Off-Line.
- Aprender a hacer movimientos con la programadora "FlexPendant"...
{slider title="1. Aprender a Desempaquetar una Estación" alias="1. Aprender a Desempaquetar una Estación"}
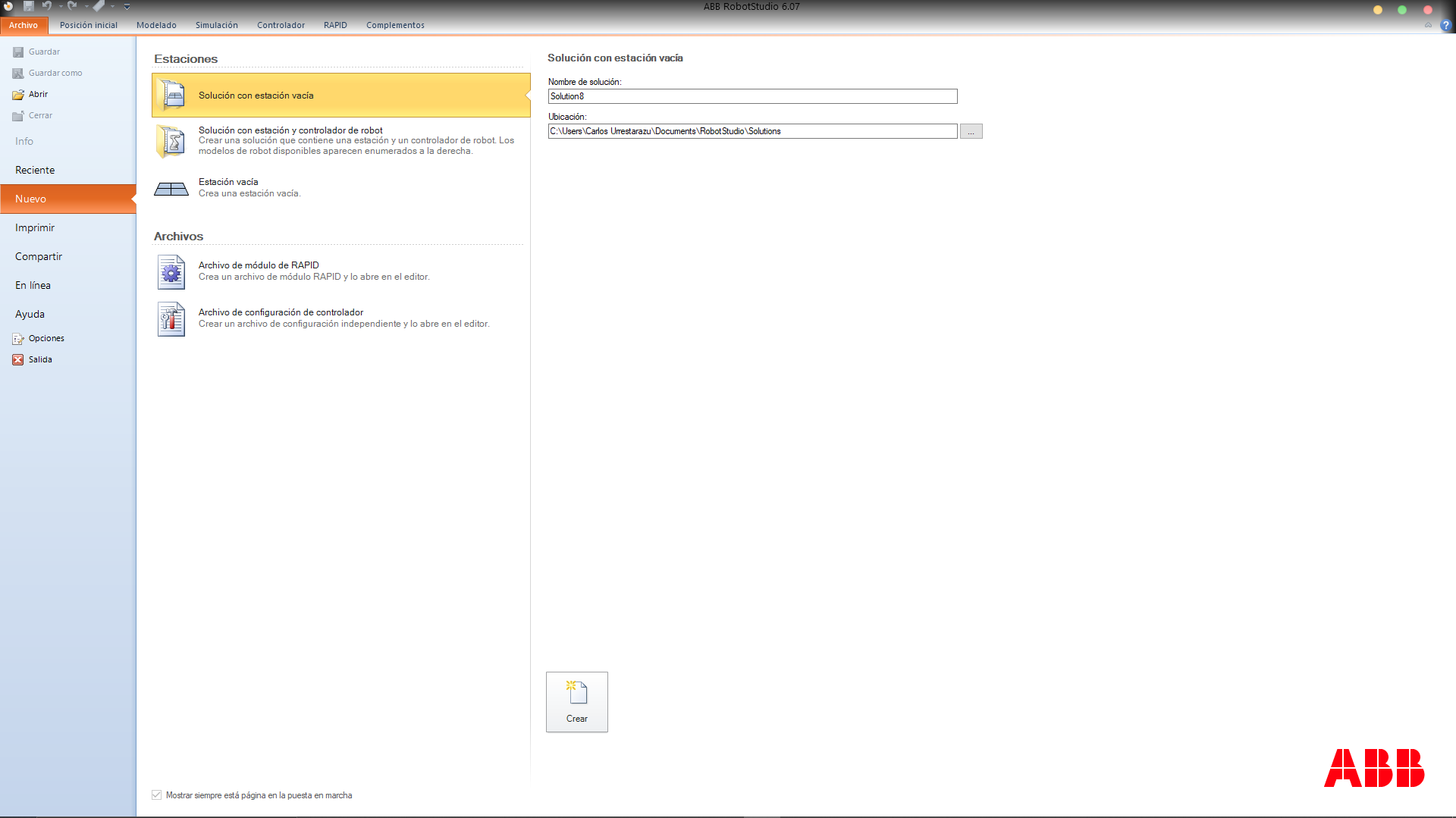
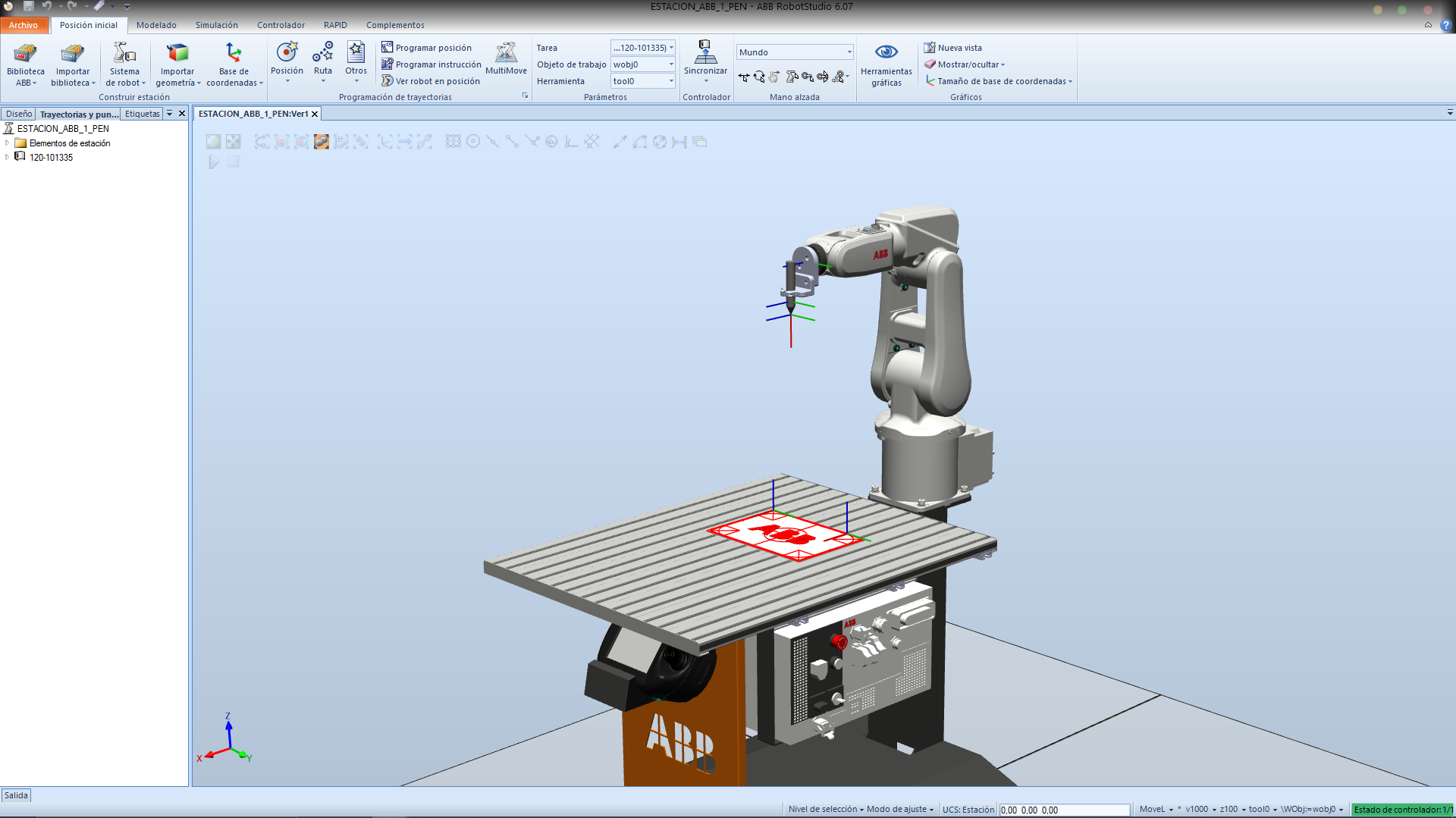
1º Abrimos Robot Studio, y nos encontraremos con la siguiente ventana:
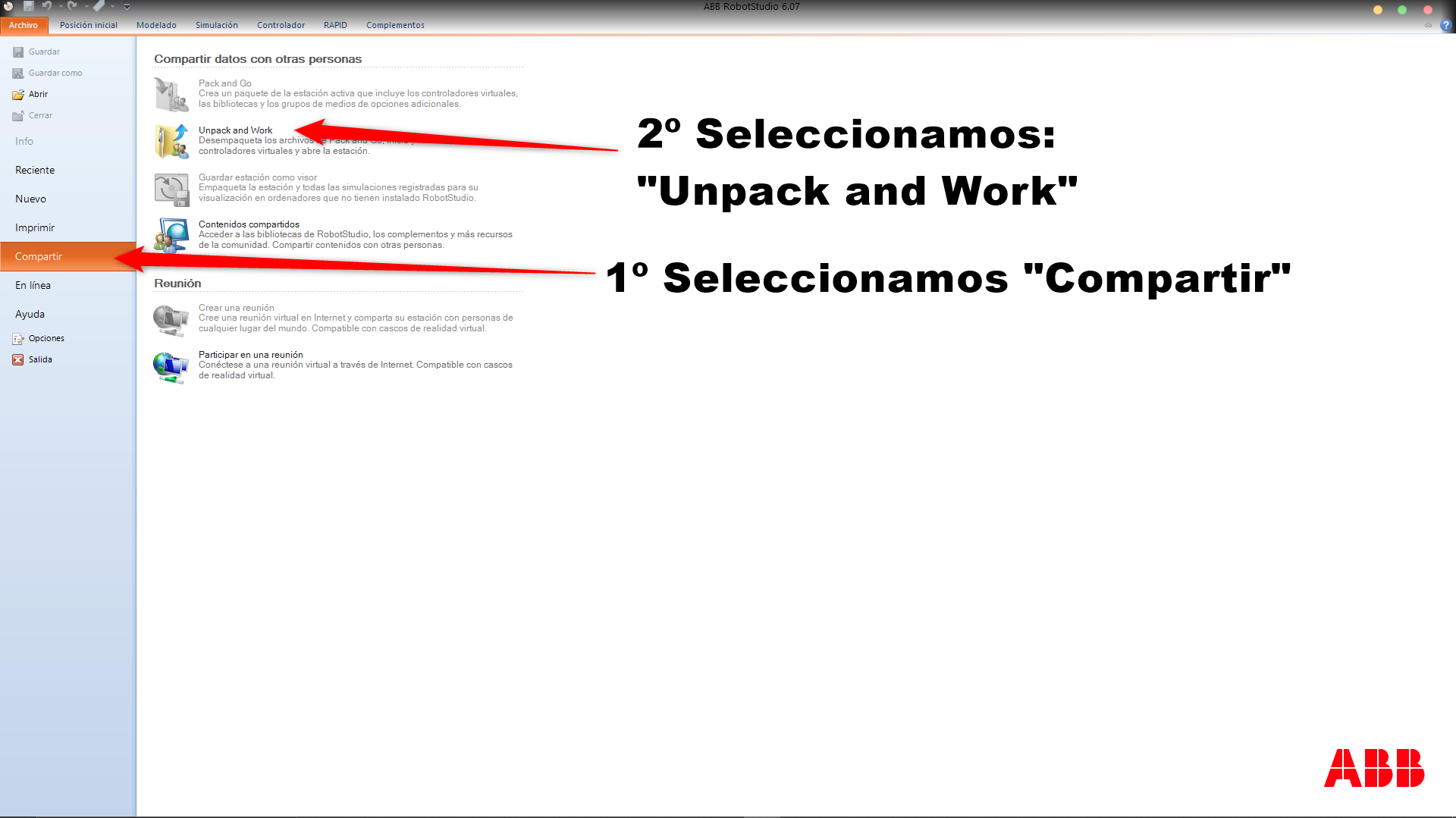
2º Descargaremos la Estación: "ESTACION_ABB_1_PEN. rspag", y a continuación en Robot Studio de ABB iremos a: "Compartir > Unpack and Work".
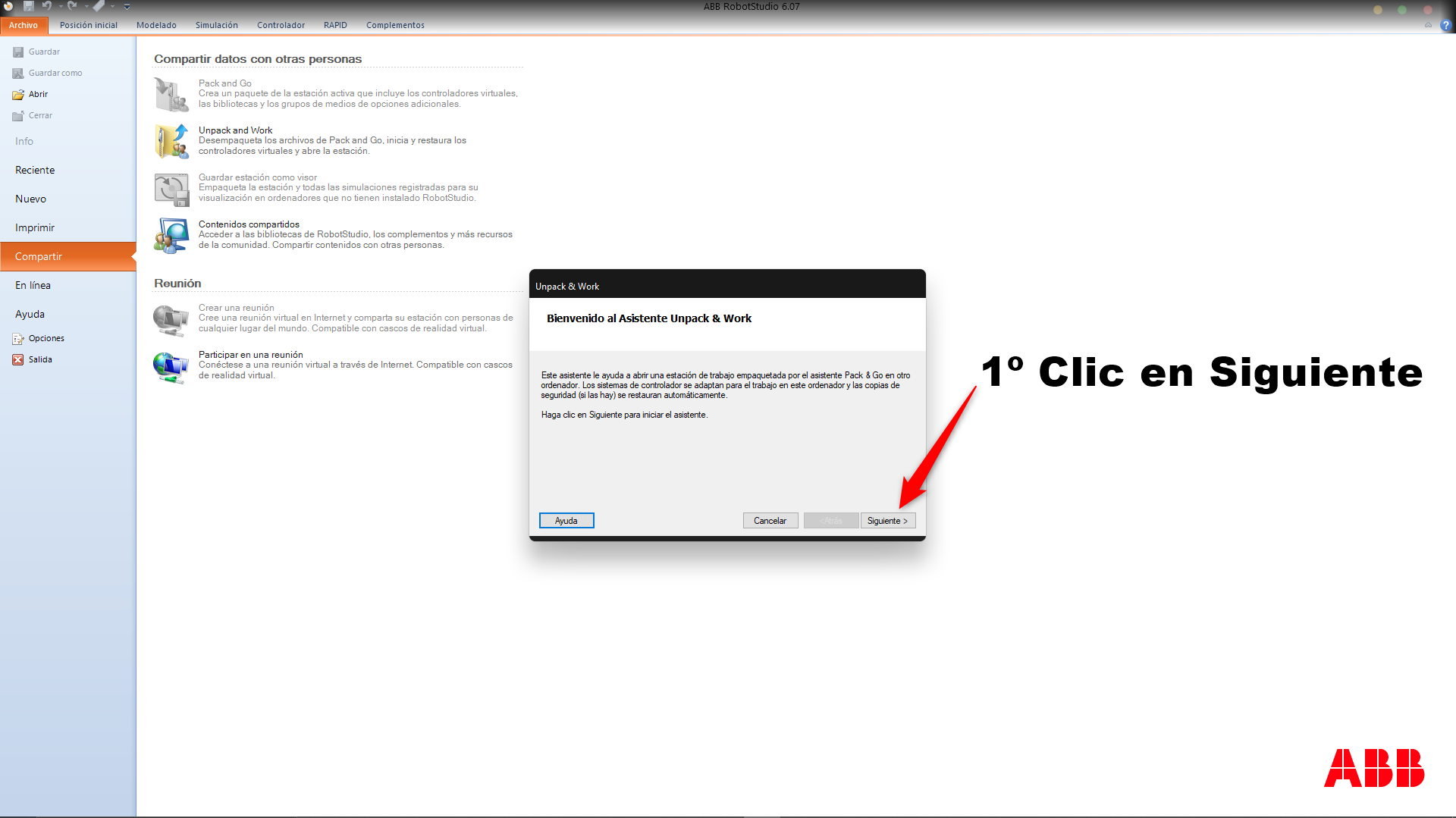
3º Aparecerá la siguiente ventana, donde clicaremos en Siguiente.
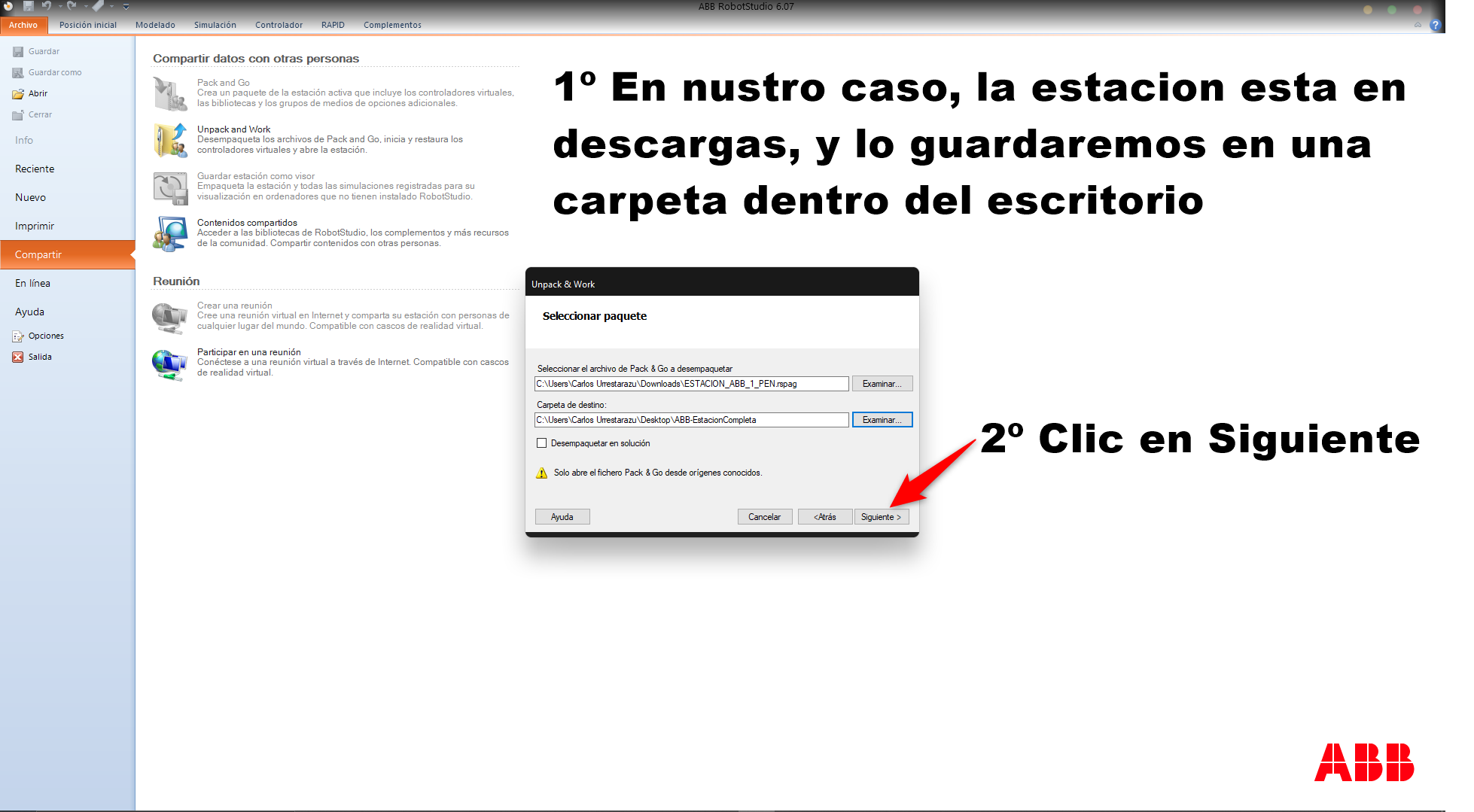
4º En el primer paso localizaremos la Ruta de la estación que descargamos anteriormente, una vez localizada y cargada, asignaremos en el punto 2 la ruta de guardado que deseemos.
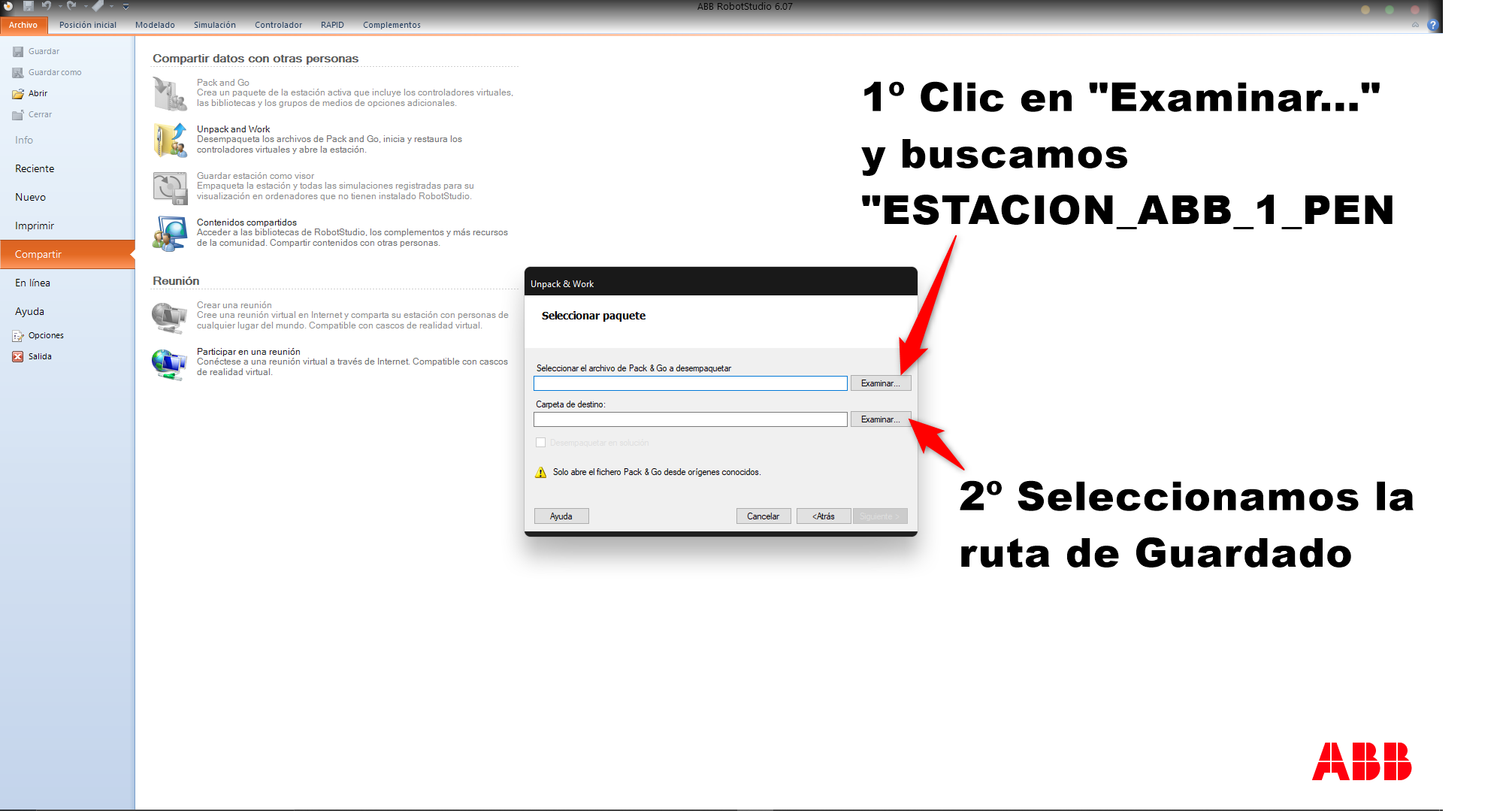
5º En nuestro caso los directorios quedan tal y como se ve en la imagen, una vez terminamos clicaremos en siguiente.
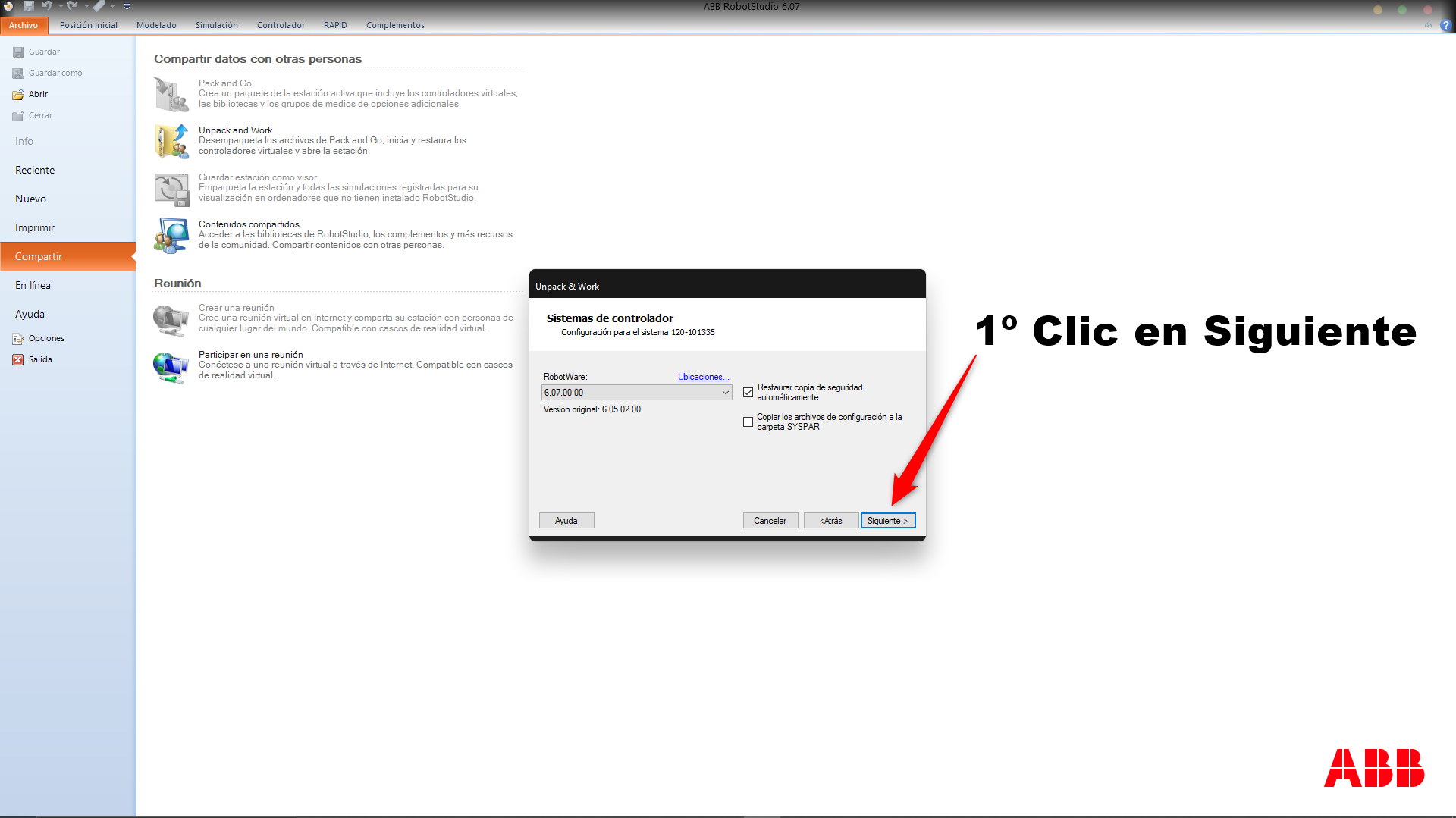
6º En esta ventana haremos clic en Sigueinte.
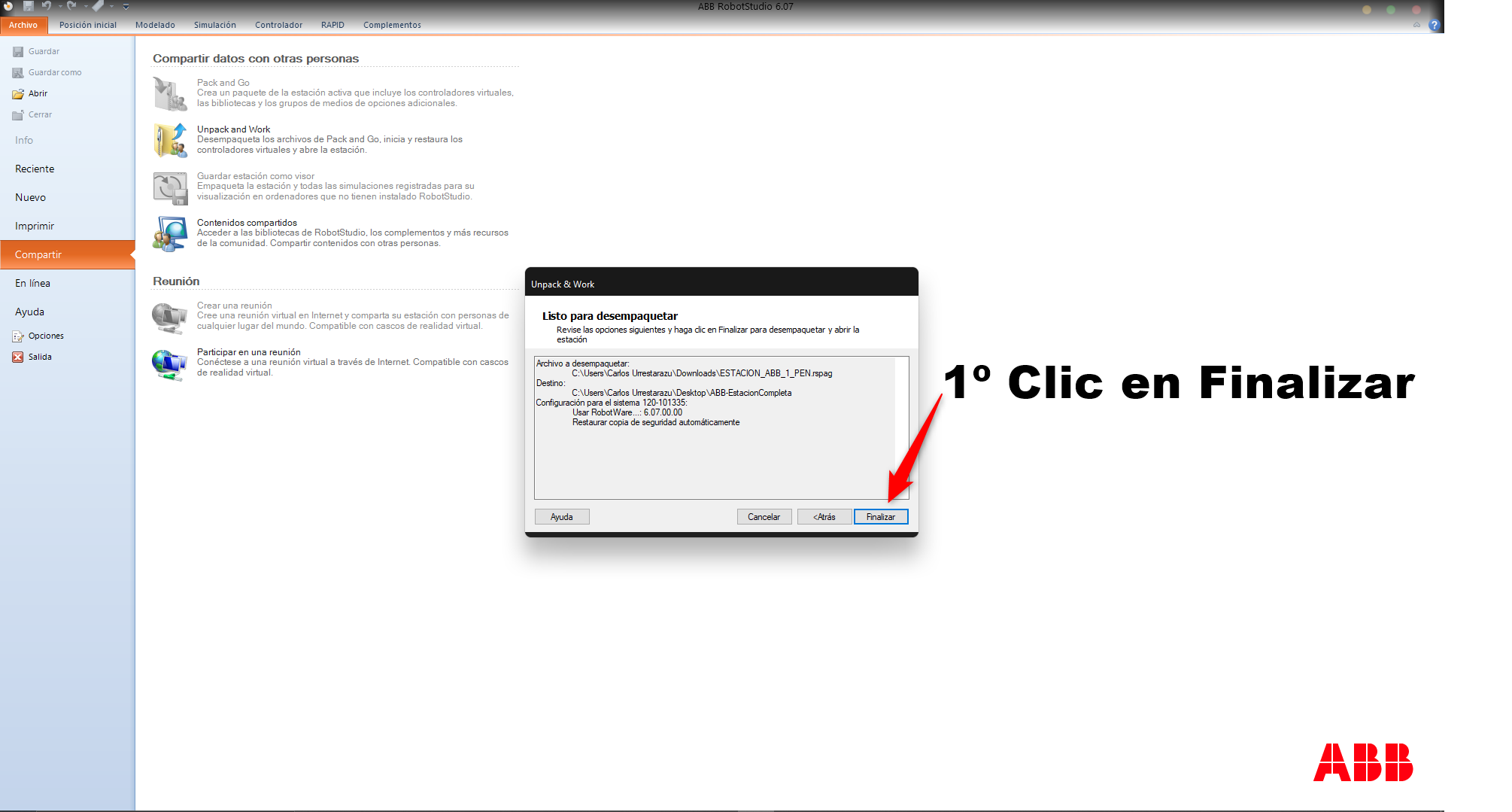
7º Haremos clic en finalizar y comenzará el desempaquetado de la Estación.
8º Una vez terminado el desempaquetado, daremos clic en Cerrar.
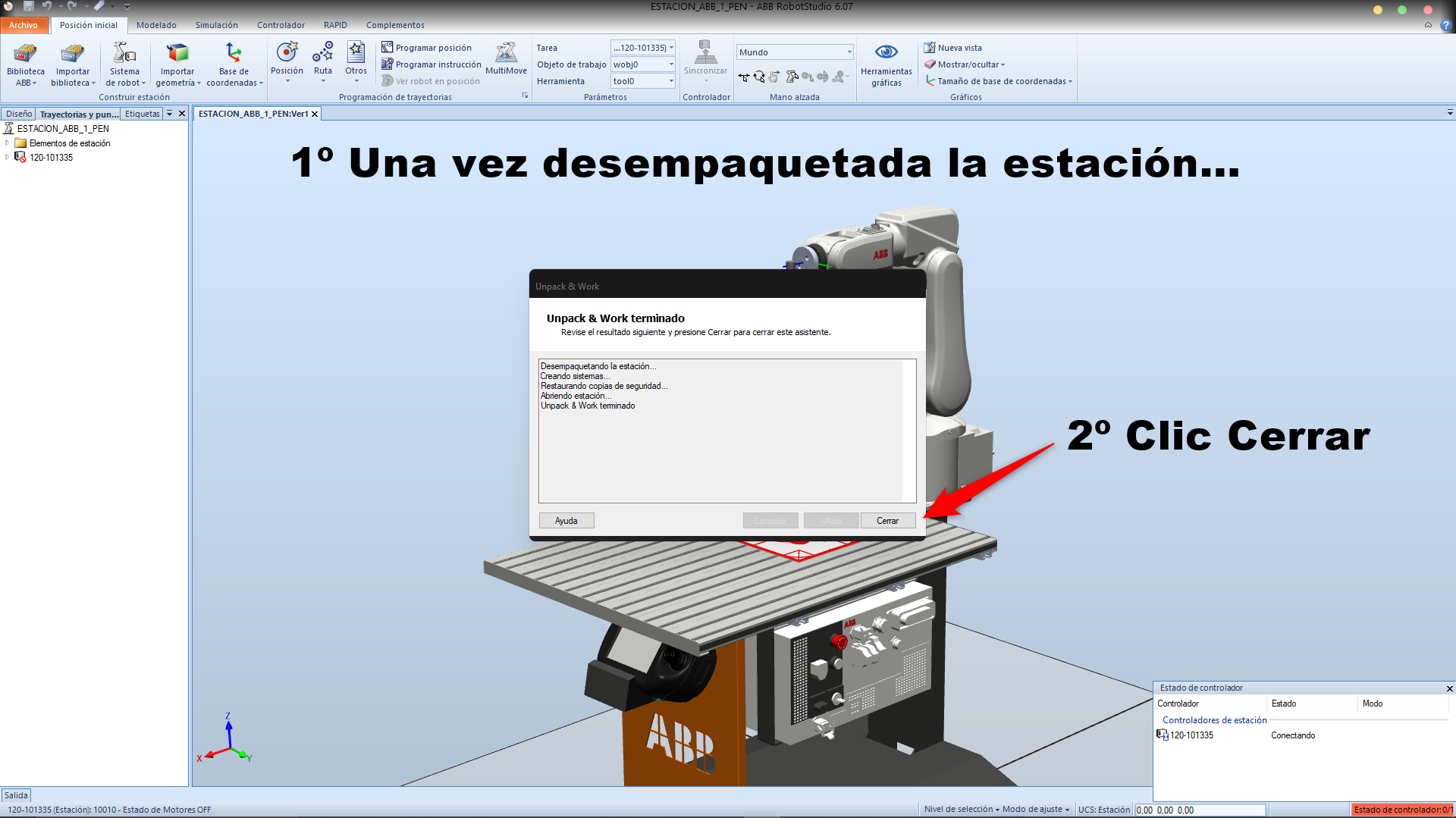
9º Una vez cerrado aparecerá el espacio de trabajo, en el cual vemos la estación de Formación cargada.
{slider title="2. Aprender a abrir la FlexPendant" alias="2. Aprender a abrir la FlexPendant"}
10º Para comenzar a programar iremos a Controlador > FelxPendant.
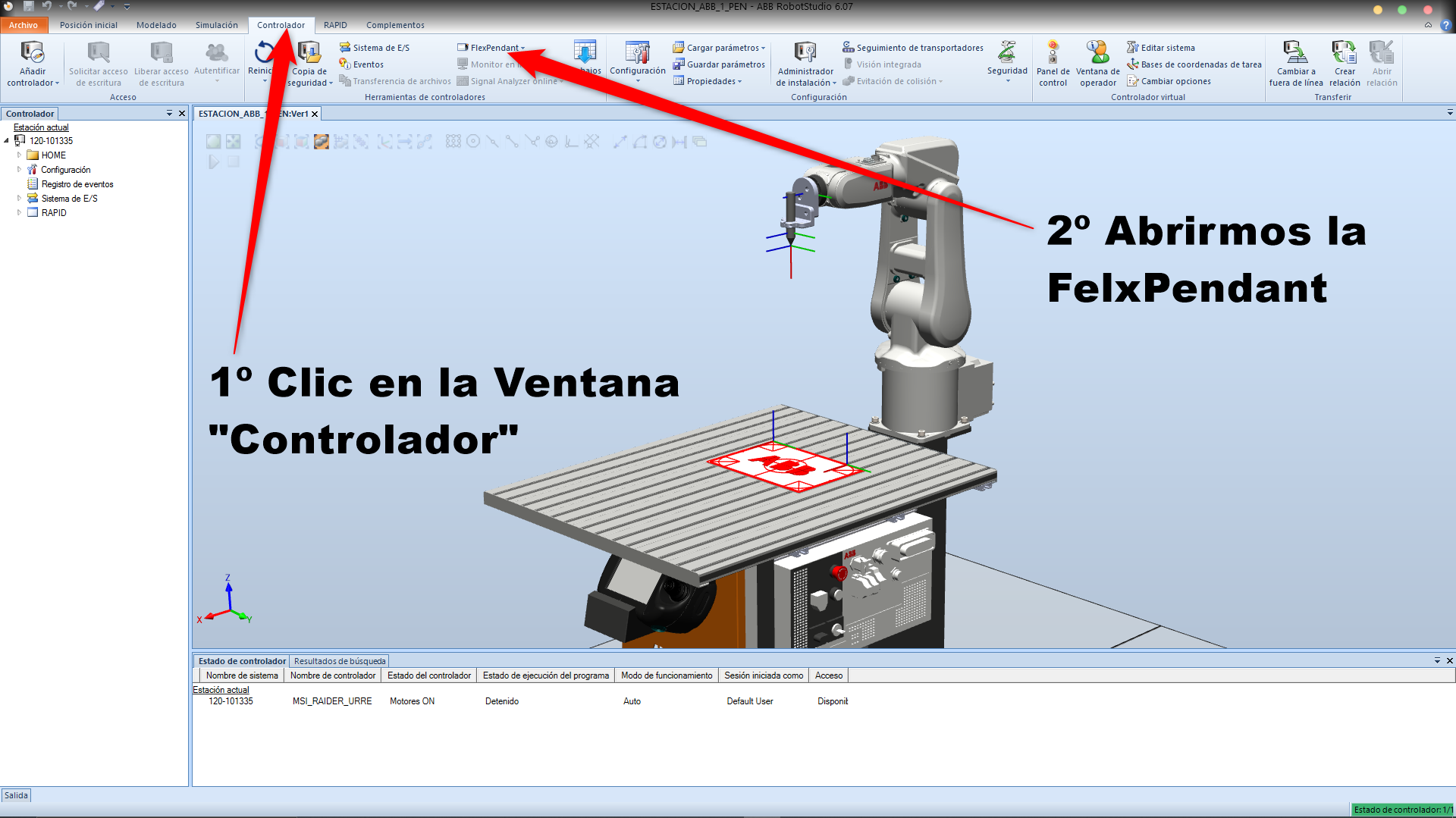
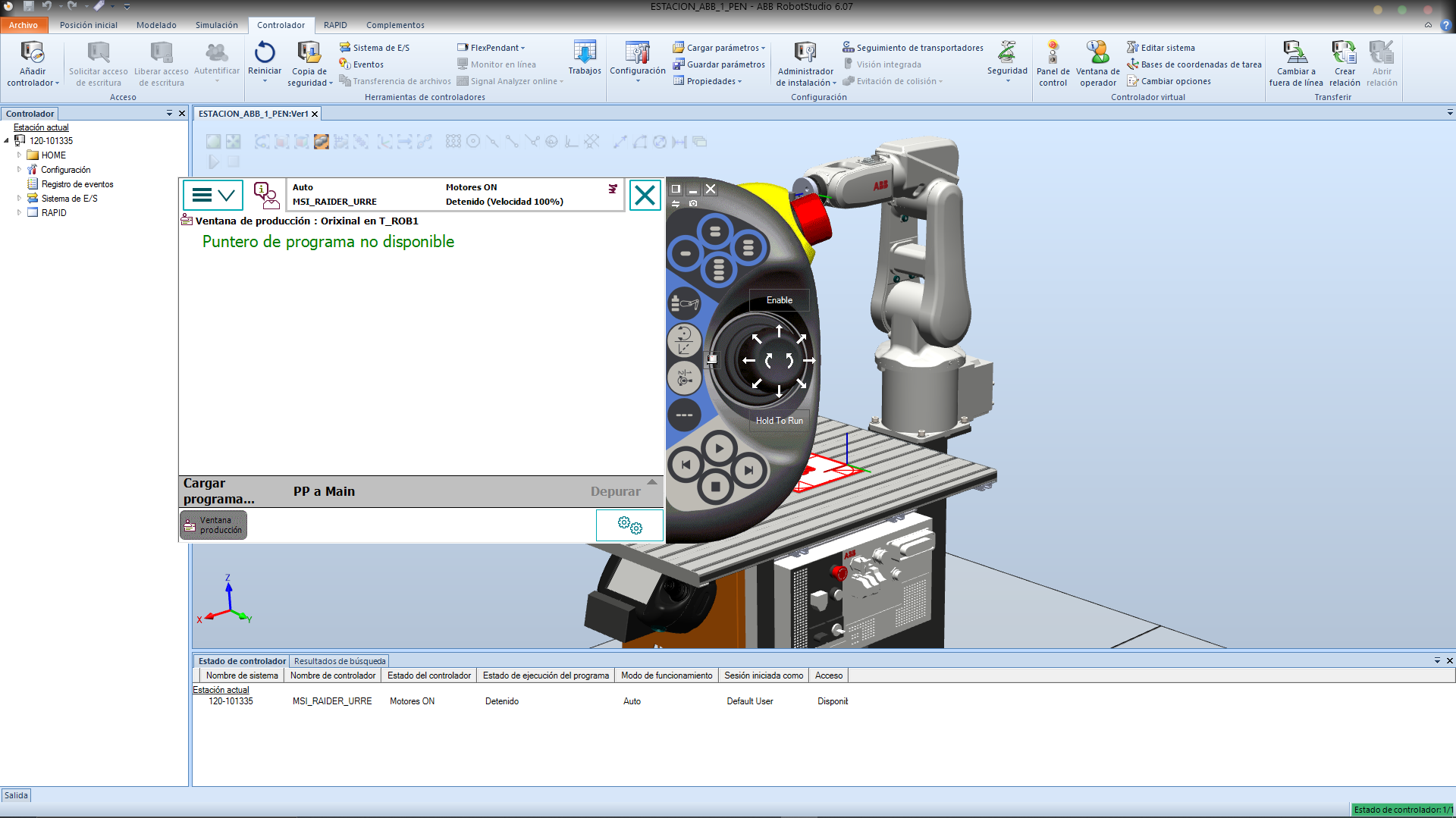
11º La FelxPendant aparecerá tal que así:
{slider title="3. Aprender a crear y mover el Robot con la FlexPendant" open="true" alias="3. Aprender a crear y mover el Robot con la FlexPendant"}
12º Para los siguientes pasos os dejamos con un video, donde haremos el ejercicio titulado (Simulación 4 ABB).
{/sliders}
| Objeto | X | Y | Z | Descargar Componentes | A | B | C |
| Robot | 0 | 0 | 805,00 | Componente Robot | 0 | 0 | 0 |
| Mesa Formación | 792 | 0 | 0 | Componente Mesa Formación | 0 | 0 | 90 |
| Plantilla | 0 | 0 | 0 | Componente Plantilla ABB | 0 | 0 | 0 |
| MyTool (Unida automáticamente ao Robot) | - | - | - | Componente MyTool | - | - | Rot Z = 90º |
| Estación Completa (Sin Programación) | - | - | - | Estación Completa | - | - | - |
Links de Interes:
 |
 |
 |
 |
Fecha de Publicación: 22/11/2020
Simulación 3 con RobotStudio ABB, MoveL.
Programación de robots industriales Off-Line.
- Aprender a hacer movimientos con la instrución " MoveL".
- Para Aprender a Colocar el Robot, Solido, Herramientas y saber añadir los primeros Puntos, visite nuestro articulo: Simulación 1 ABB
| Objetos | X | Y | Z | Descargar Componentes | A | B | C |
| Robot | 0 | 0 | 620 | Componente Robot | 0 | 0 | 0 |
| Solido (Bancada) | -220 | -300 | 0 | Creación en RobotStudio | 0 | 0 | 0 |
| MyTool (Unida automáticamente ao Robot) | 3 | 0 | 1214 | Componente MyTool | 180 | 60 | 180 |
Links de Interés:
|
|
|
 |
 |
|
Fecha Publicación: 10/11/2020