Simulación 4.0 con RobotStudio ABB, FlexPendant.
Programación de robots industriais Off-Line.
- Aprender a facer movementos coa programadora "FlexPendant"...
{slider title="1. Aprender a Desempaquetar unha Estación" alias="1. Aprender a Desempaquetar unha Estación"}
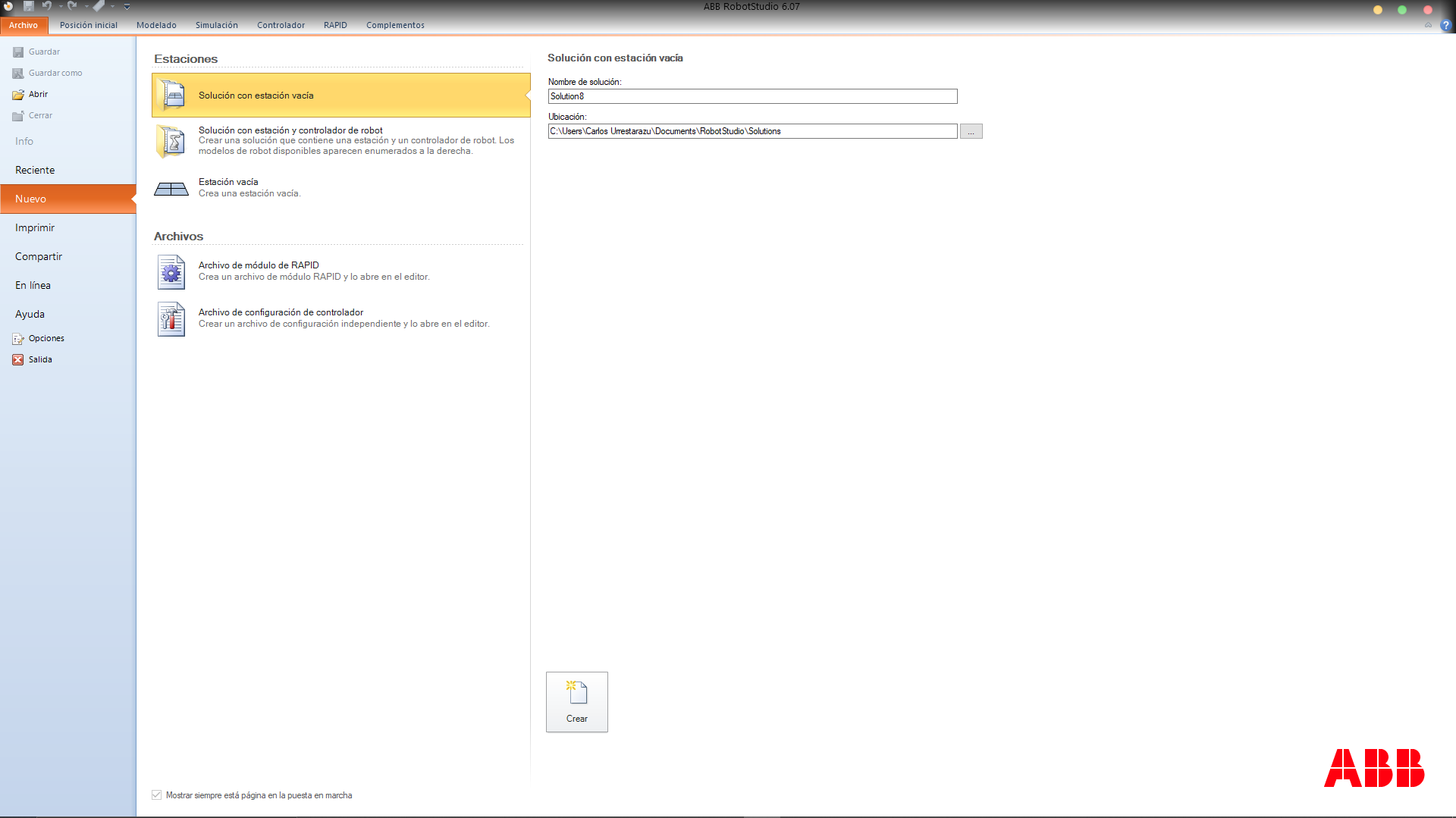
1º Abrimos Robot Studio, e atoparémonos coa seguinte xanela:
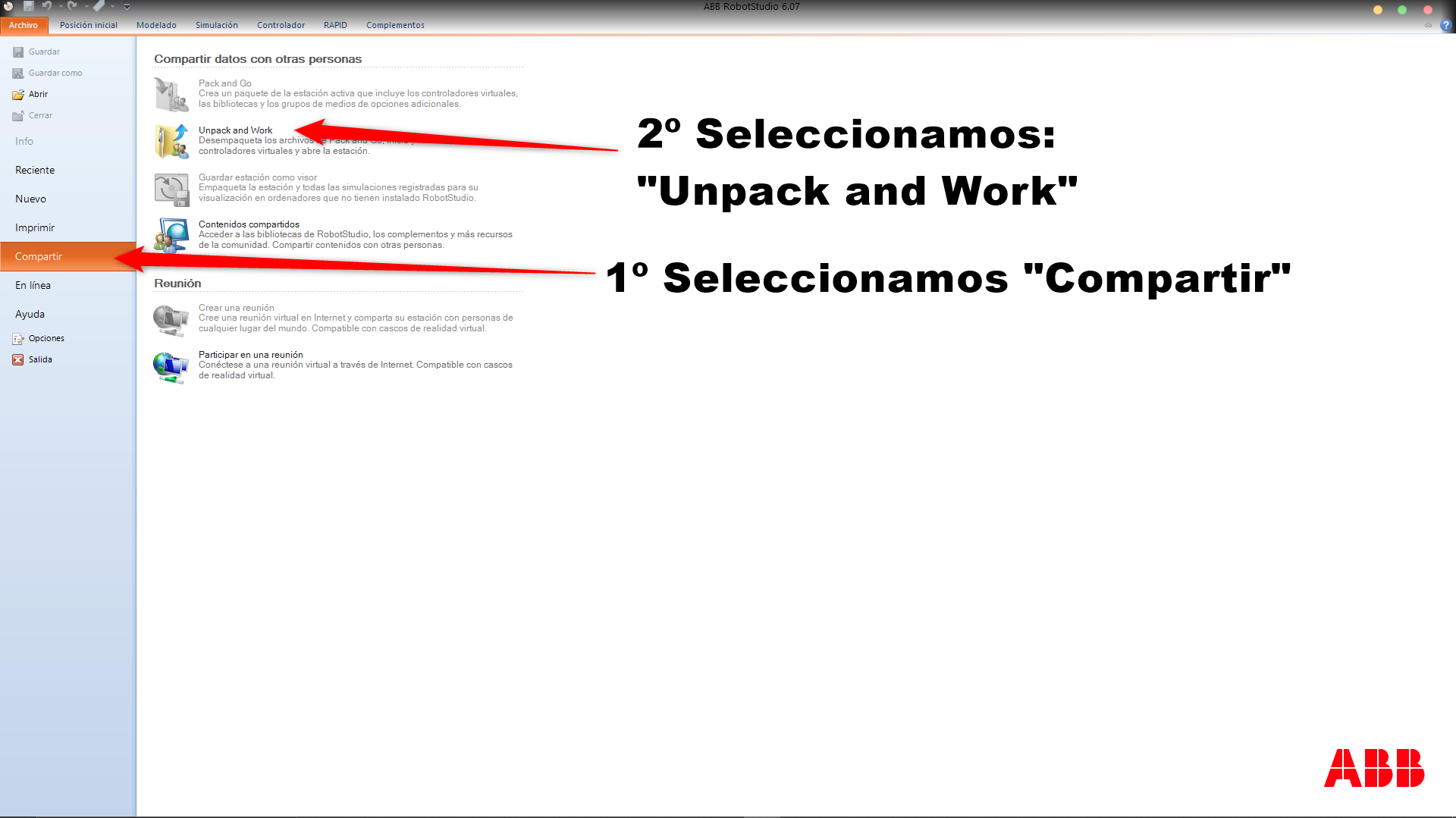
2º Descargaremos a Estación: "ESTACION_ABB_1_PEN. rspag", e a continuación en Robot Studio de ABB iremos a: "Compartir > Unpack and Work".
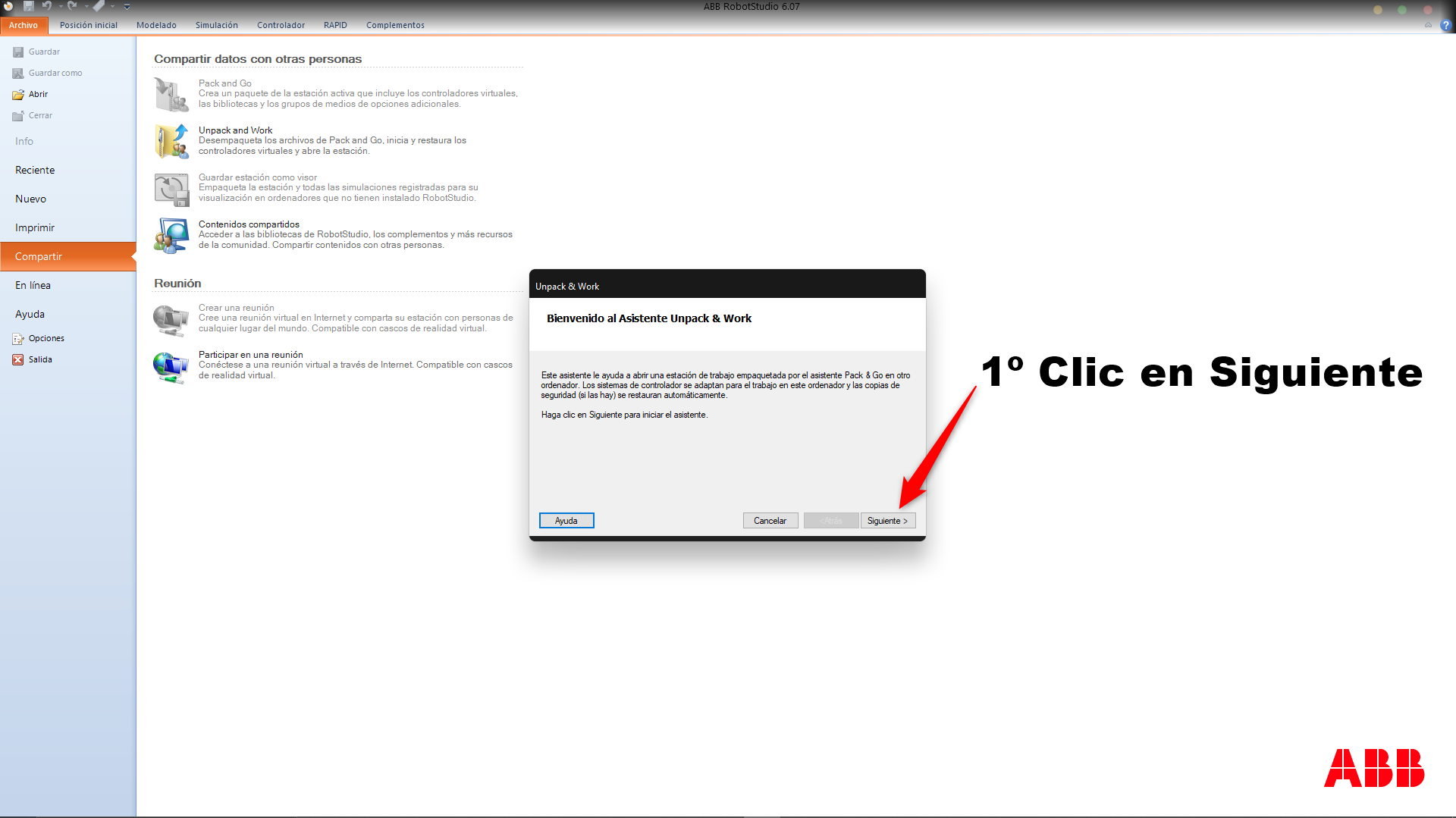
3º Aparecerá a seguinte xanela, onde clicaremos en Seguinte.
4º No primeiro paso localizaremos o Roteiro da estación que descargamos anteriormente, unha vez localizada e cargada, asignaremos no punto 2 o roteiro de gardado que desexemos.
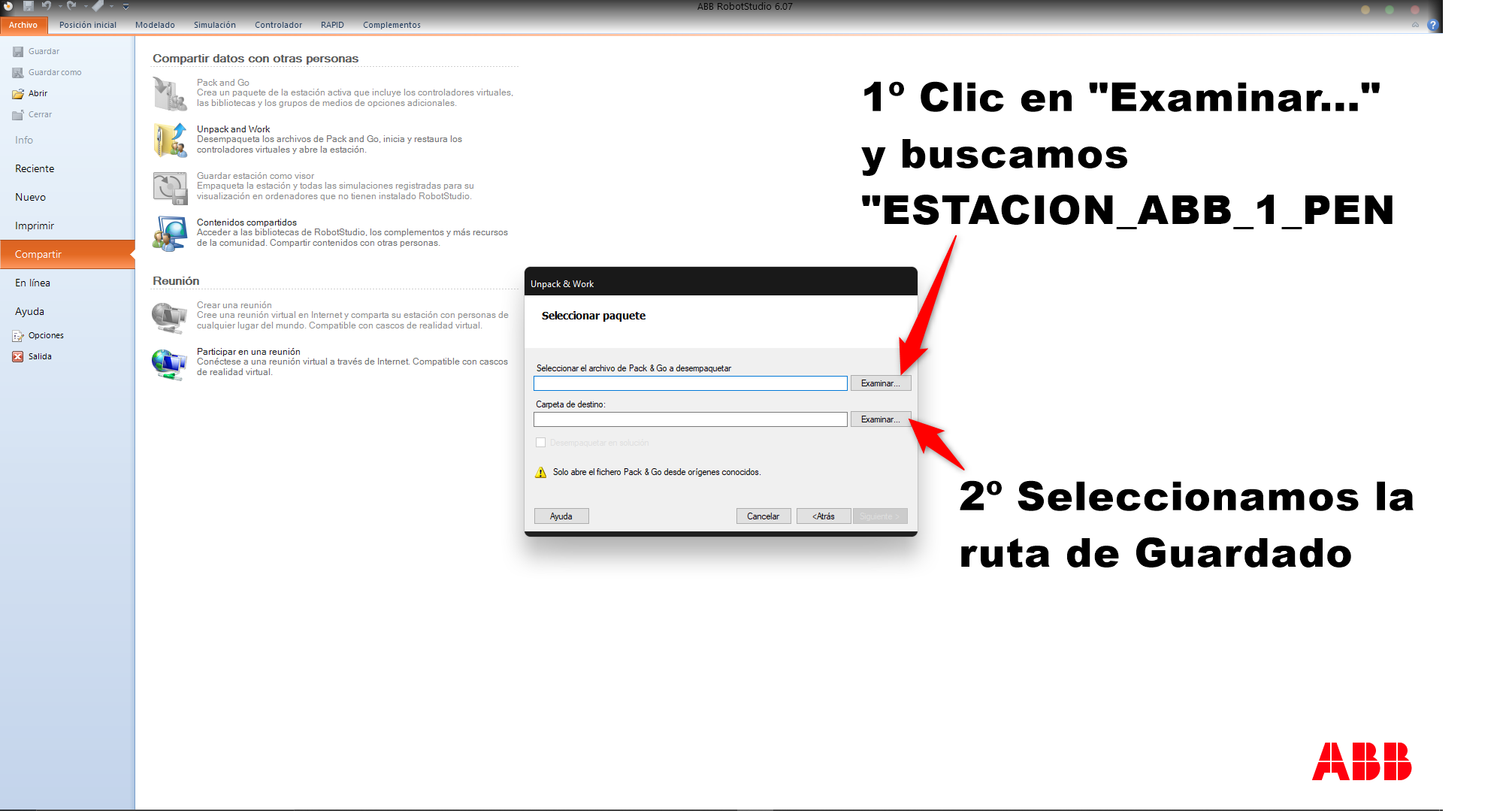
5º No noso caso os directorios quedan tal e como se ve na imaxe, unha vez terminamos dámoslle a seguinte.
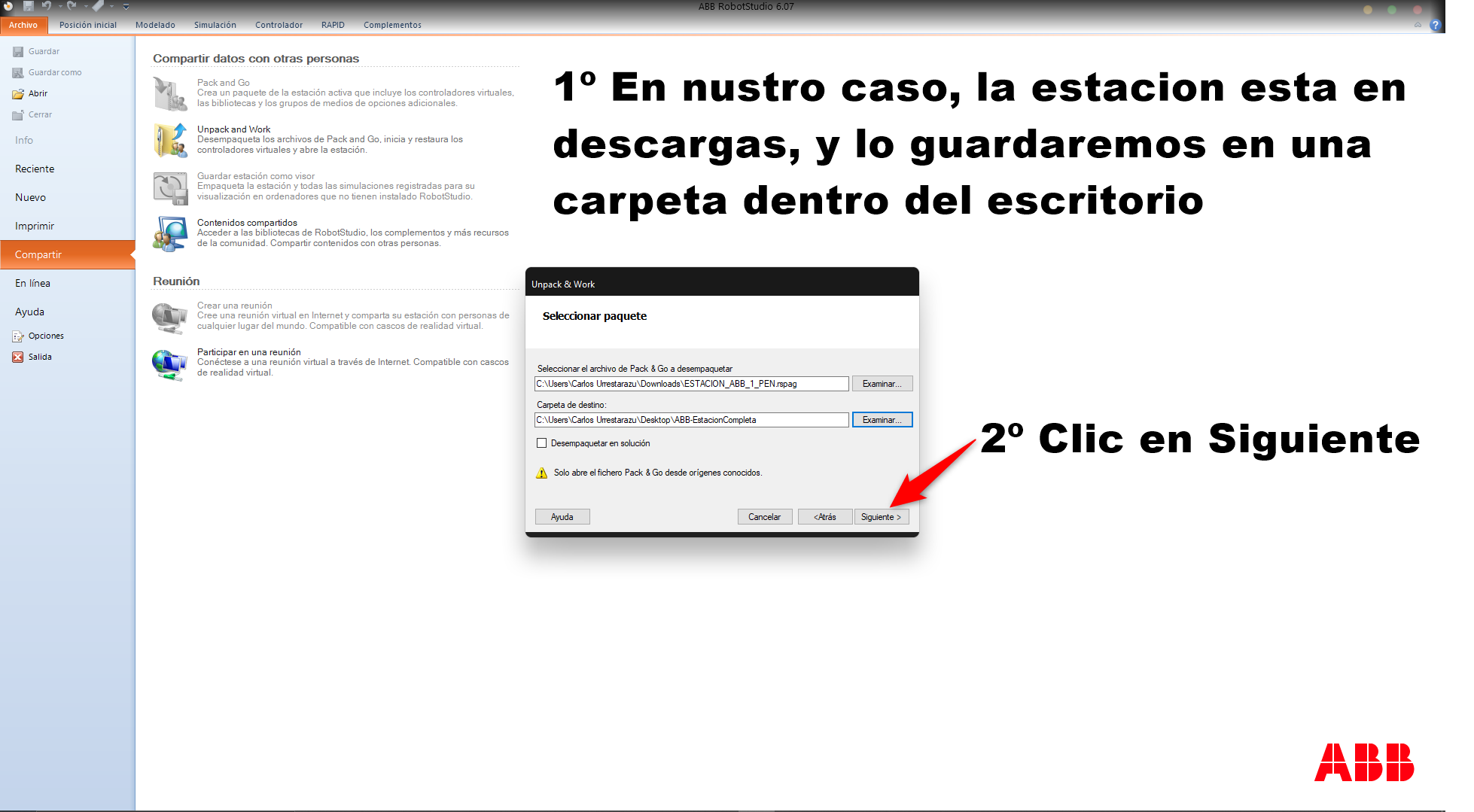
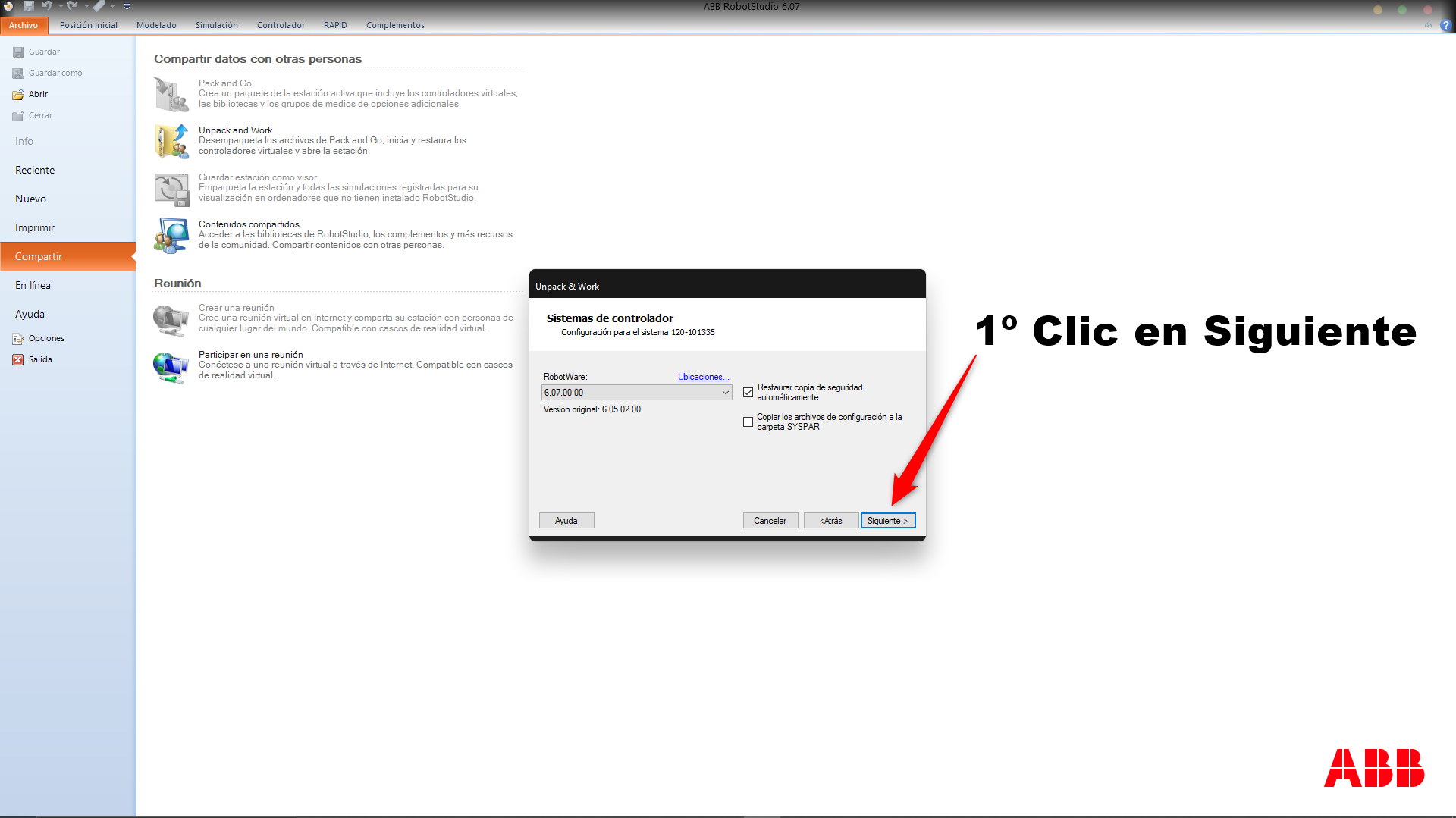
6º Nesta xanela faremos clic en seguinte.
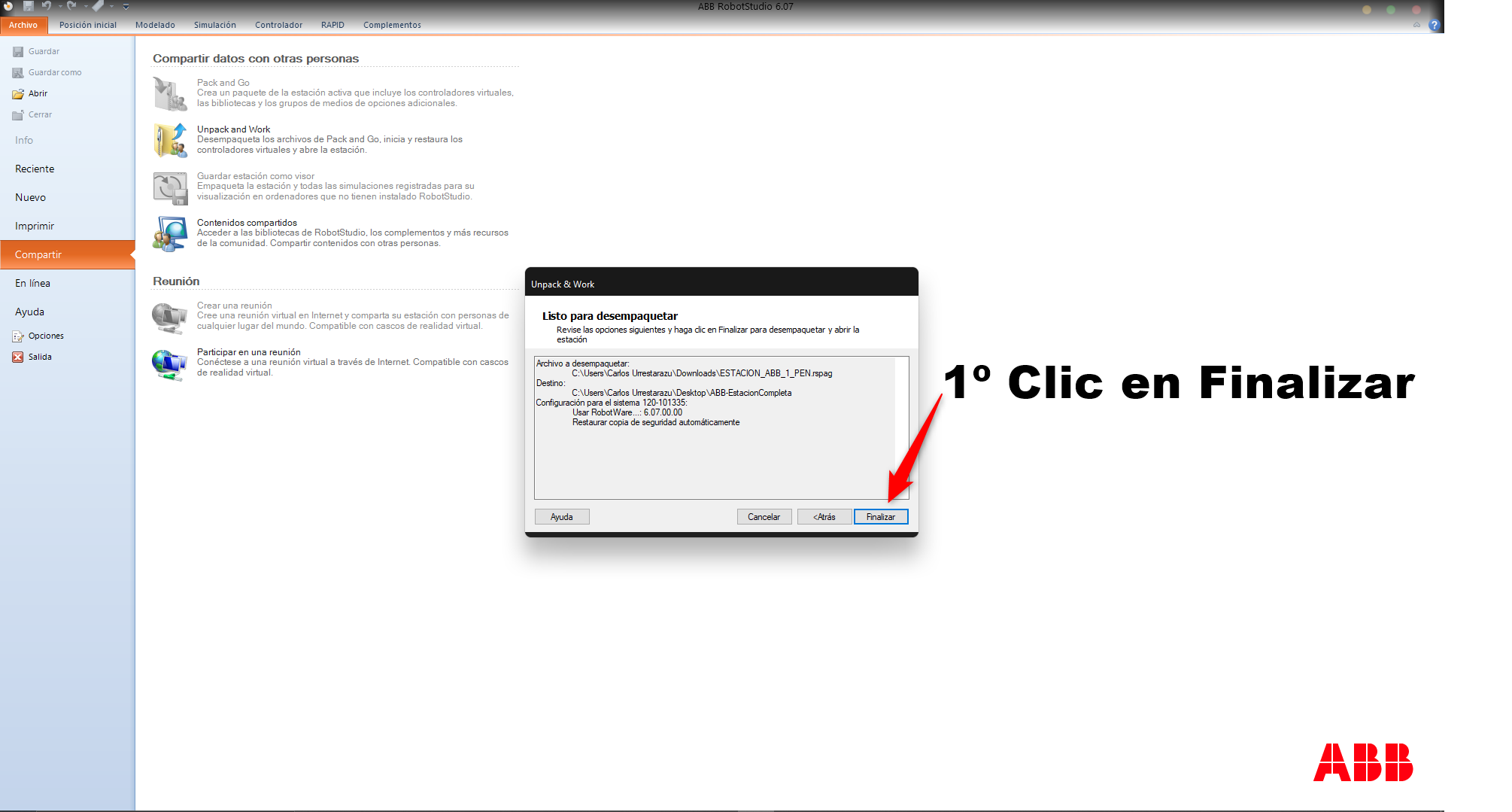
7º Faremos clic en finalizar e comezase o desempaquetado da Estación.
8º Unha vez terminado o desempaquetado, darémoslle clic en Pechar.
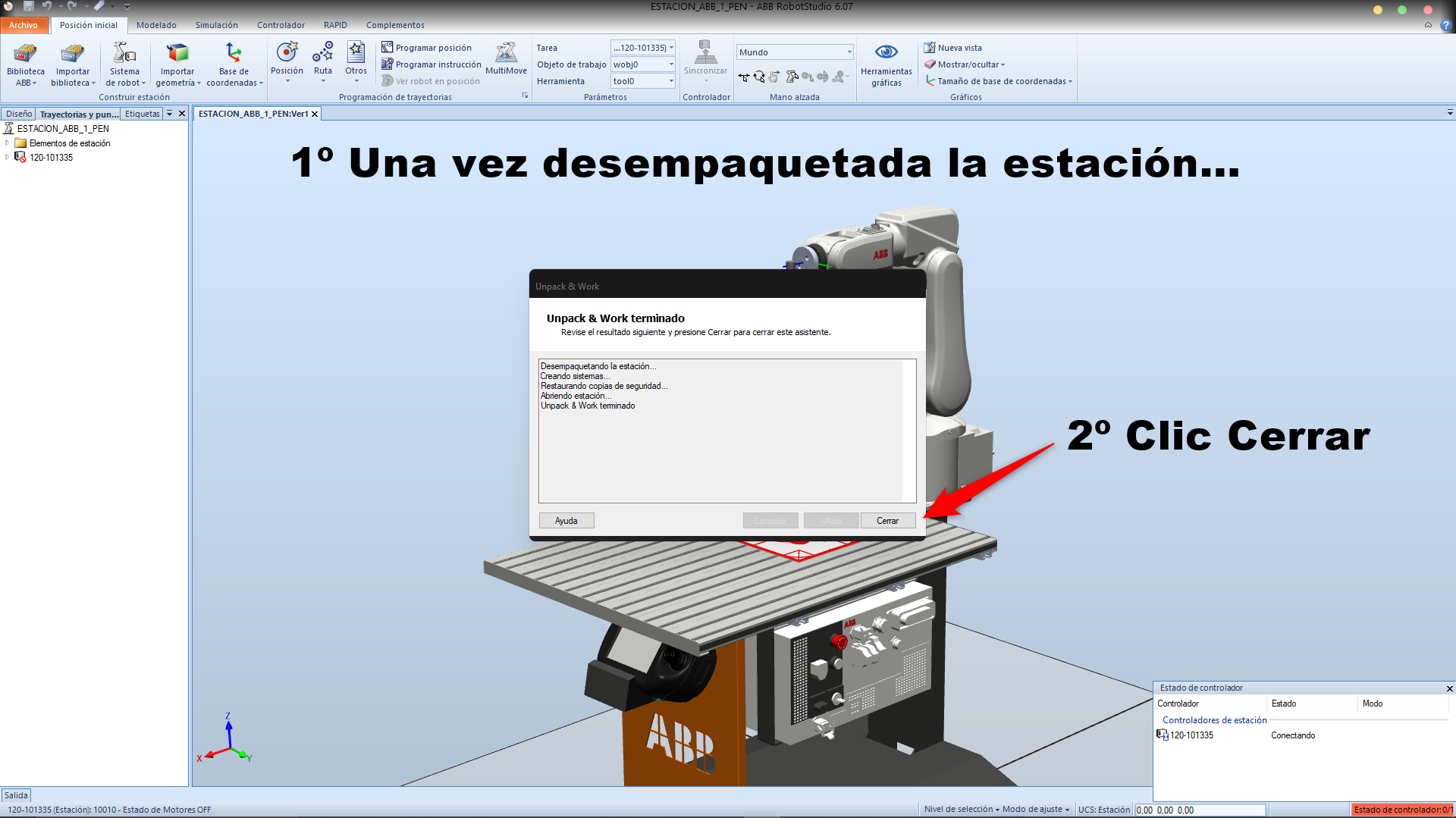
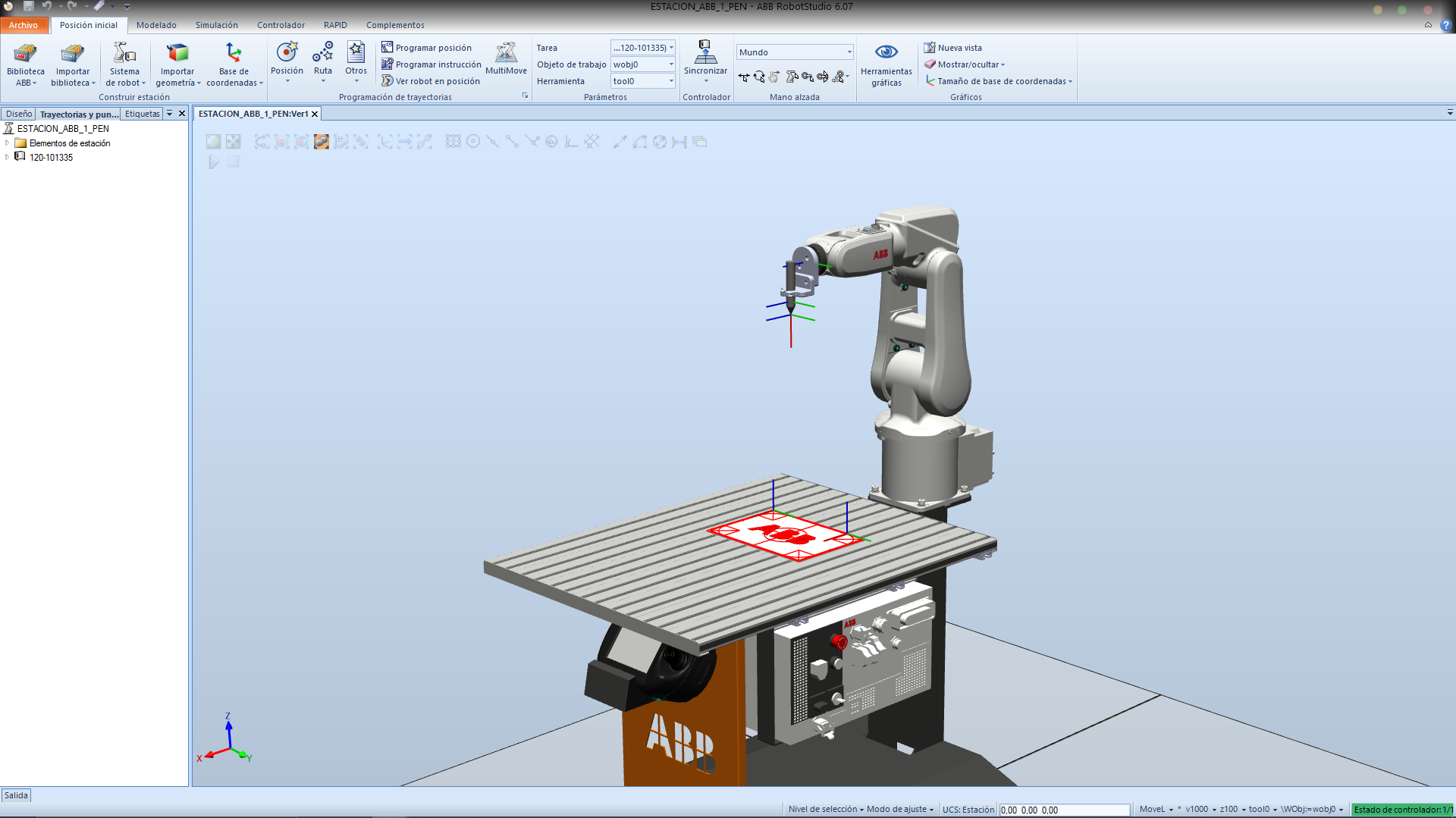
9º Unha vez pechado aparecerá o espazo traballo, no cal vemos a estación de Formación cargada.
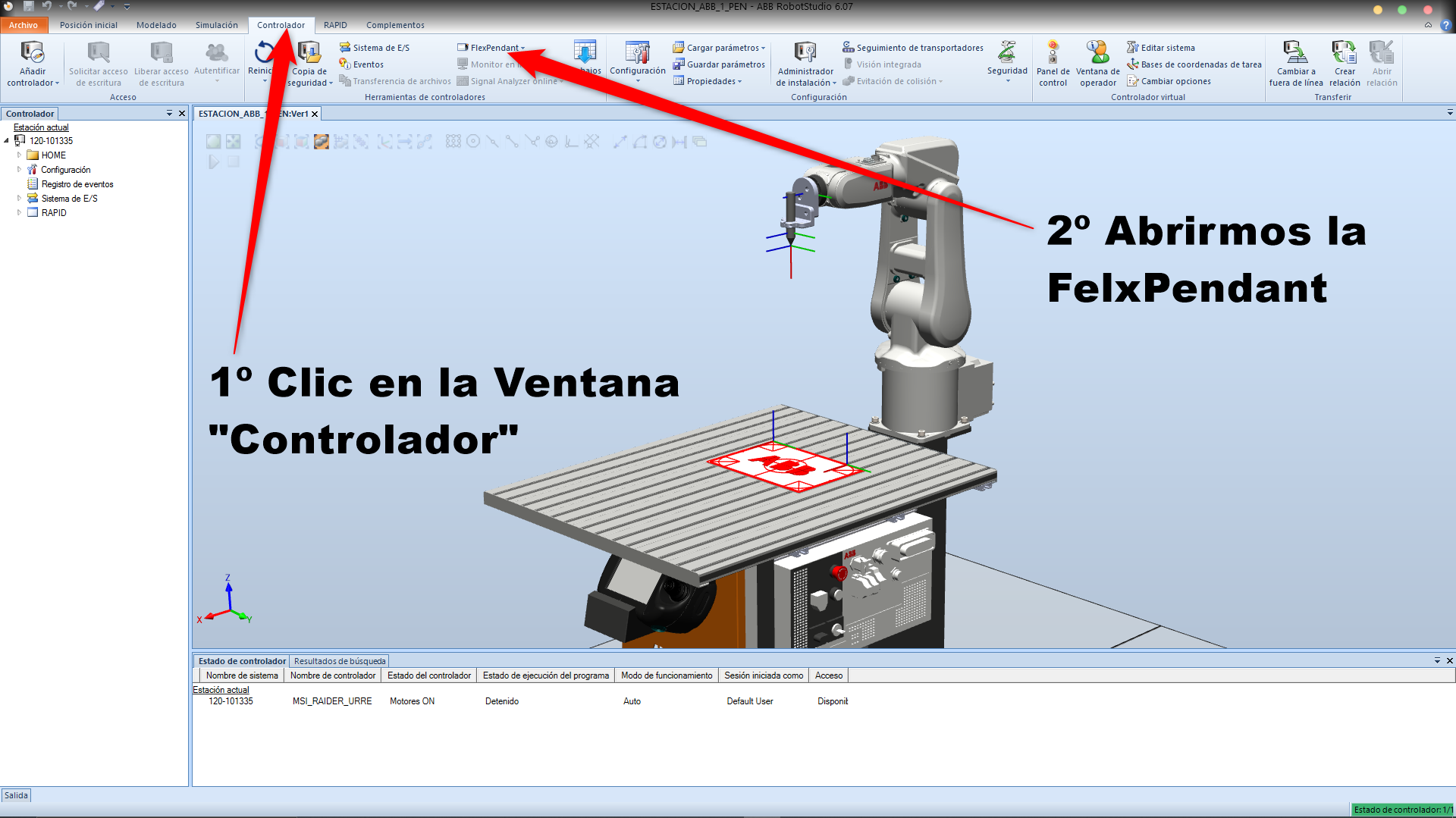
{slider title="2. Aprender a abrir a FlexPendant" alias="2. Aprender a abrir a FlexPendant"}
10º Para comezar a programar iremos a Controlador > FelxPendant.
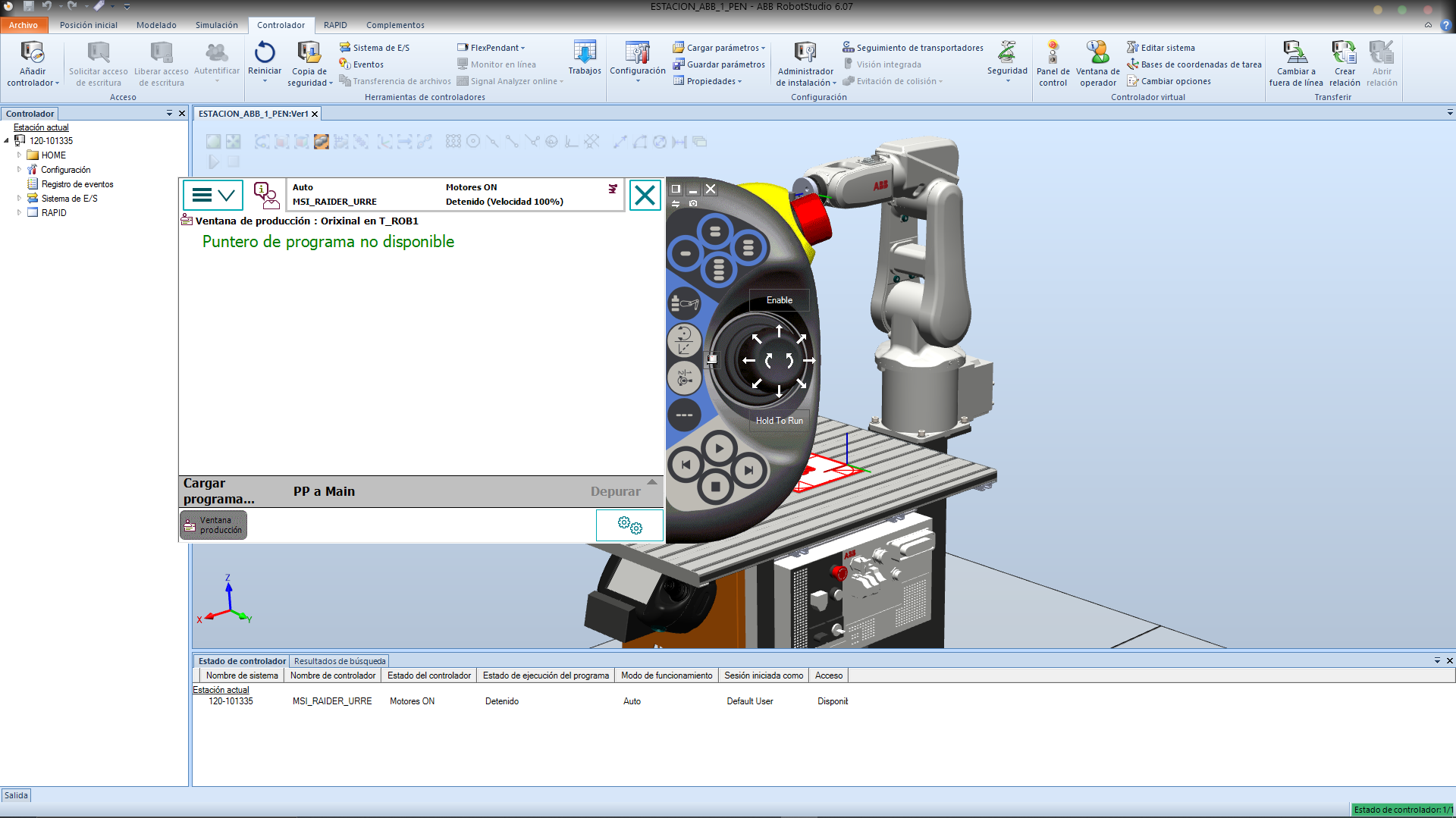
11º A FelxPendant aparecerá tal que así:
{slider title="3. Aprender a crear e mover o Robot coa FlexPendant" open="true" alias="3. Aprender a crear e mover o Robot coa FlexPendant"}
12º Para os seguintes pasos deixámosvos cun pequeno vídeo, onde faremos o exercicio titulado (Simulación 4 ABB).
{/sliders}
| Obxecto | X | Y | Z | Descargar Componentes | A | B | C |
| Robot | 0 | 0 | 805,00 | Componente Robot | 0 | 0 | 0 |
| Mesa Formación | 792 | 0 | 0 | Componente Mesa Formación | 0 | 0 | 90 |
| Plantilla | 0 | 0 | 0 | Componente Plantilla ABB | 0 | 0 | 0 |
| MyTool (Unida automáticamente ao Robot) | - | - | - | Componente MyTool | - | - | Rot Z = 90º |
| Estación Completa (Sin Programación) | - | - | - | Estación Completa | - | - | - |
Links de Interese:
 |
 |
 |
 |
Data Publicación: 22/11/2020
Simulación 3 con RobotStudio ABB, MoveL.
Programación de robots industriais Off-Line.
- Aprender a facer movementos coa instrución " MoveL".
- Para Aprender a Colocar o Robot, Solido, Ferramentas e saber engadir os primeiros Puntos, visite noso articulo: Simulación 1 ABB
| Obxecto | X | Y | Z | Descargar Componentes | A | B | C |
| Robot | 0 | 0 | 620 | Componente Robot | 0 | 0 | 0 |
| Solido (Bancada) | -220 | -300 | 0 | Creación en RobotStudio | 0 | 0 | 0 |
| MyTool (Unida automáticamente ao Robot) | 3 | 0 | 1214 | Componente MyTool | 180 | 60 | 180 |
Links de Interese:
|
|
|
 |
 |
|
Data Publicación: 10/11/2020