Programación 11 V2 ABB.
Aprender Linguaxe RAPID, poderemos programar desde RobotStudio, ou desde a FlexPendant.
- Exemplo usando estas instrucións MoveL Offs, WaitTime & FOR; Se quere realizar o exemplo pode tomar como base a estación Estación PROG_11 V2 Vacía:
MODULE Module1 CONST robtarget Primera_Pos:=[[-0.222935967,0.000098037,49.999436079],[0,0,1,0],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; VAR num NSec := 0; CONST jointtarget Home_Abs:=[[0,0,0,0,30,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; VAR num X; VAR num Y; VAR num Z; PROC main() X := 0; Y := 0; MoveAbsJ Home_Abs,v1000,fine,MyTool\WObj:=W_Soldar; FOR NSec FROM 0 to 2 DO Soldar; MoveL Offs(Primera_Pos,X,0,0),v200,fine,MyTool\WObj:=W_Soldar; X := X + 100; ENDFOR FOR NSec FROM 0 to 2 DO Soldar; MoveL Offs(Primera_Pos,X,Y,0),v200,fine,MyTool\WObj:=W_Soldar; Y := Y + 100; ENDFOR FOR NSec FROM 0 to 2 DO Soldar; X := X - 100; MoveL Offs(Primera_Pos,X,Y,0),v200,fine,MyTool\WObj:=W_Soldar; ENDFOR Soldar; MoveAbsJ Home_Abs,v1000,fine,MyTool\WObj:=W_Soldar; ENDPROC PROC Soldar() MoveL Offs(Primera_Pos,X,Y,0),v200,fine,MyTool\WObj:=W_Soldar; MoveL Offs(Primera_Pos,X,Y,-50),v200,fine,MyTool\WObj:=W_Soldar; SetDo Q1,1; WaitTime 2; SetDo Q1,0; MoveL Offs(Primera_Pos,X,Y,0),v200,fine,MyTool\WObj:=W_Soldar; ENDPROC ENDMODULE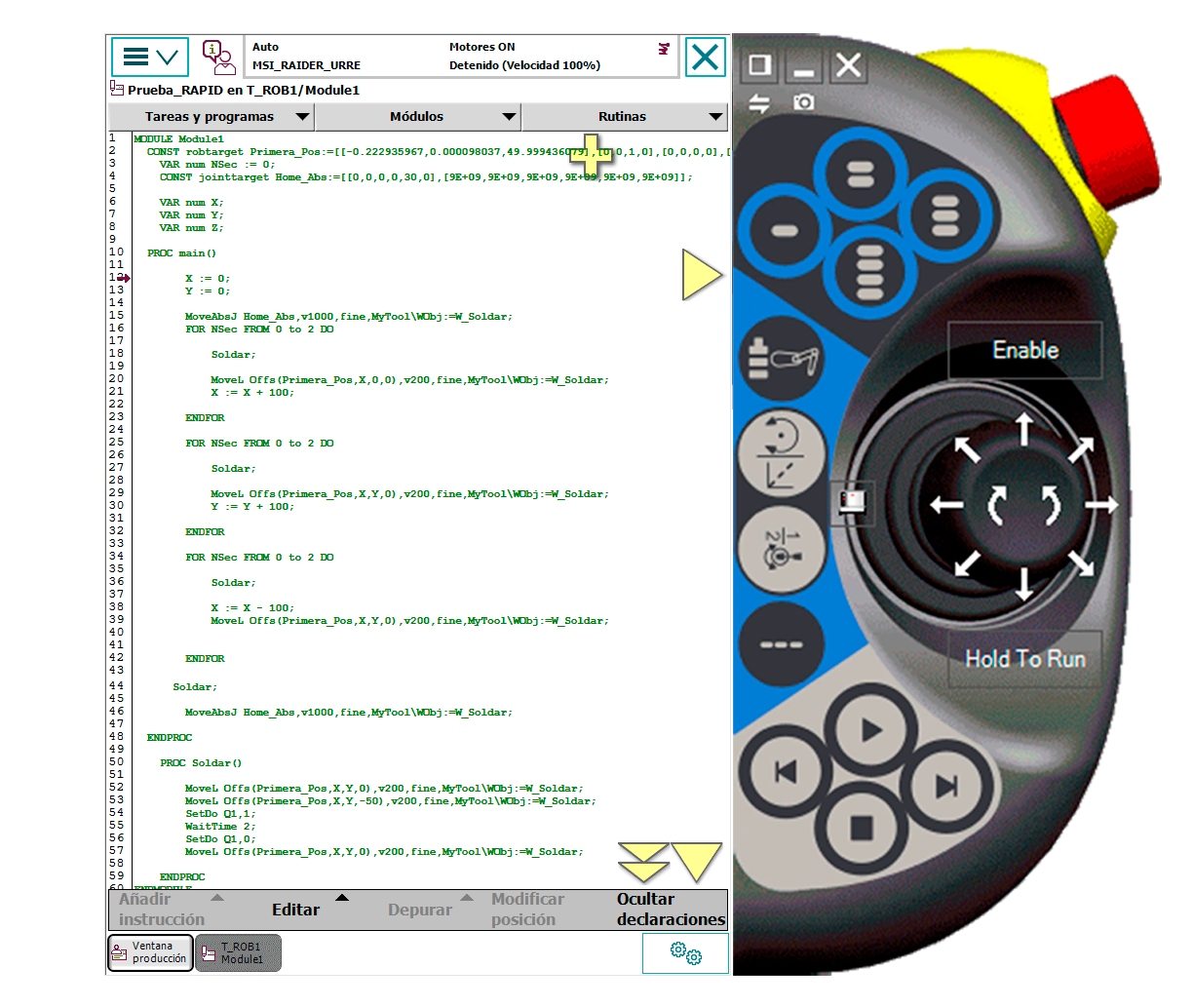
Links de Interese:





Data Publicación: 03/03/2021

Programación 11 ABB.
Aprender Linguaxe RAPID, poderemos programar desde RobotStudio, ou desde a FlexPendant.
- Exemplo usando estas instrucións MoveL Tras, WaitTime, FOR & ReTool; Se quere realizar o exemplo pode tomar como base a estación Estación PROG_11 Vacía:
MODULE Module1 VAR robtarget Primera_Pos:=[[-0.222935967,0.000098037,49.999436079],[0,0,1,0],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; VAR num NSec := 0; CONST jointtarget Home_Abs:=[[0,0,0,0,30,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; PROC main() Primera_Pos.trans.x := -0.222935967; Primera_Pos.trans.y := 0.000098037; Primera_Pos.trans.z := 49.999436079; MoveAbsJ Home_Abs,v1000,fine,MyTool\WObj:=W_Soldar; FOR NSec FROM 0 to 2 DO Soldar; Primera_Pos.trans.x := Primera_Pos.trans.x + 100; MoveL Primera_Pos,v200,fine,MyTool\WObj:=W_Soldar; ENDFOR FOR NSec FROM 0 to 2 DO Soldar; Primera_Pos.trans.y := Primera_Pos.trans.y + 100; MoveL Primera_Pos,v200,fine,MyTool\WObj:=W_Soldar; ENDFOR FOR NSec FROM 0 to 2 DO Soldar; Primera_Pos.trans.x := Primera_Pos.trans.x - 100; MoveL Primera_Pos,v200,fine,MyTool\WObj:=W_Soldar; ENDFOR Soldar; MoveAbsJ Home_Abs,v1000,fine,MyTool\WObj:=W_Soldar; ENDPROC PROC Soldar() MoveL RelTool(Primera_Pos,0,0,0),v200,fine,MyTool\WObj:=W_Soldar; MoveL RelTool(Primera_Pos,0,0,50),v200,fine,MyTool\WObj:=W_Soldar; SetDo Q1,1; WaitTime 2; SetDo Q1,0; MoveL RelTool(Primera_Pos,0,0,0),v200,fine,MyTool\WObj:=W_Soldar; ENDPROC ENDMODULE
Links de Interese:
Data Publicación: 12/02/2021