Programación 10 ABB.
Aprender Linguaxe RAPID, poderemos programar desde RobotStudio, ou desde a FlexPendant.
- Exemplo usando estas instrucións MoveL Tras, WaitTime & FOR; Se quere realizar o exemplo pode tomar como base o exercicio Programación 9 ABB:
MODULE Module1 CONST robtarget Target_10:=[[547.330665099,0,451.64730631],[0.190808996,0,0.981627183,0],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; VAR robtarget Avance:=[[506.304350475,0,671.647255958],[0.19080893,0,0.981627196,0],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; VAR num Contador; PROC main() MoveJ Target_10,v1000,fine,MyTool\WObj:=wobj0; Avance.trans.x := 360; Avance.trans.y := 20; Avance.trans.z := 400; MoveJ Target_10,v1000,fine,MyTool\WObj:=wobj0; MoveJ Avance,v1000,fine,MyTool\WObj:=wobj0; FOR Contador From 0 TO 5 DO MoveL Avance,v1000,fine,MyTool\WObj:=wobj0; Avance.trans.x := Avance.trans.x + 25; WaitTime 0.5; ENDFOR FOR Contador From 0 TO 5 DO MoveL Avance,v1000,fine,MyTool\WObj:=wobj0; Avance.trans.y := Avance.trans.y + 25; WaitTime 0.5; ENDFOR FOR Contador From 0 TO 5 DO MoveL Avance,v1000,fine,MyTool\WObj:=wobj0; Avance.trans.z := Avance.trans.z + 25; WaitTime 0.5; ENDFOR Avance.trans.x := 360; Avance.trans.y := 20; Avance.trans.z := 400; FOR Contador From 0 TO 5 DO MoveL Avance,v1000,fine,MyTool\WObj:=wobj0; Avance.trans.x := Avance.trans.x + 25; Avance.trans.y := Avance.trans.y + 25; Avance.trans.z := Avance.trans.z + 25; WaitTime 0.5; ENDFOR MoveJ Target_10,v1000,fine,MyTool\WObj:=wobj0; ENDPROC ENDMODULE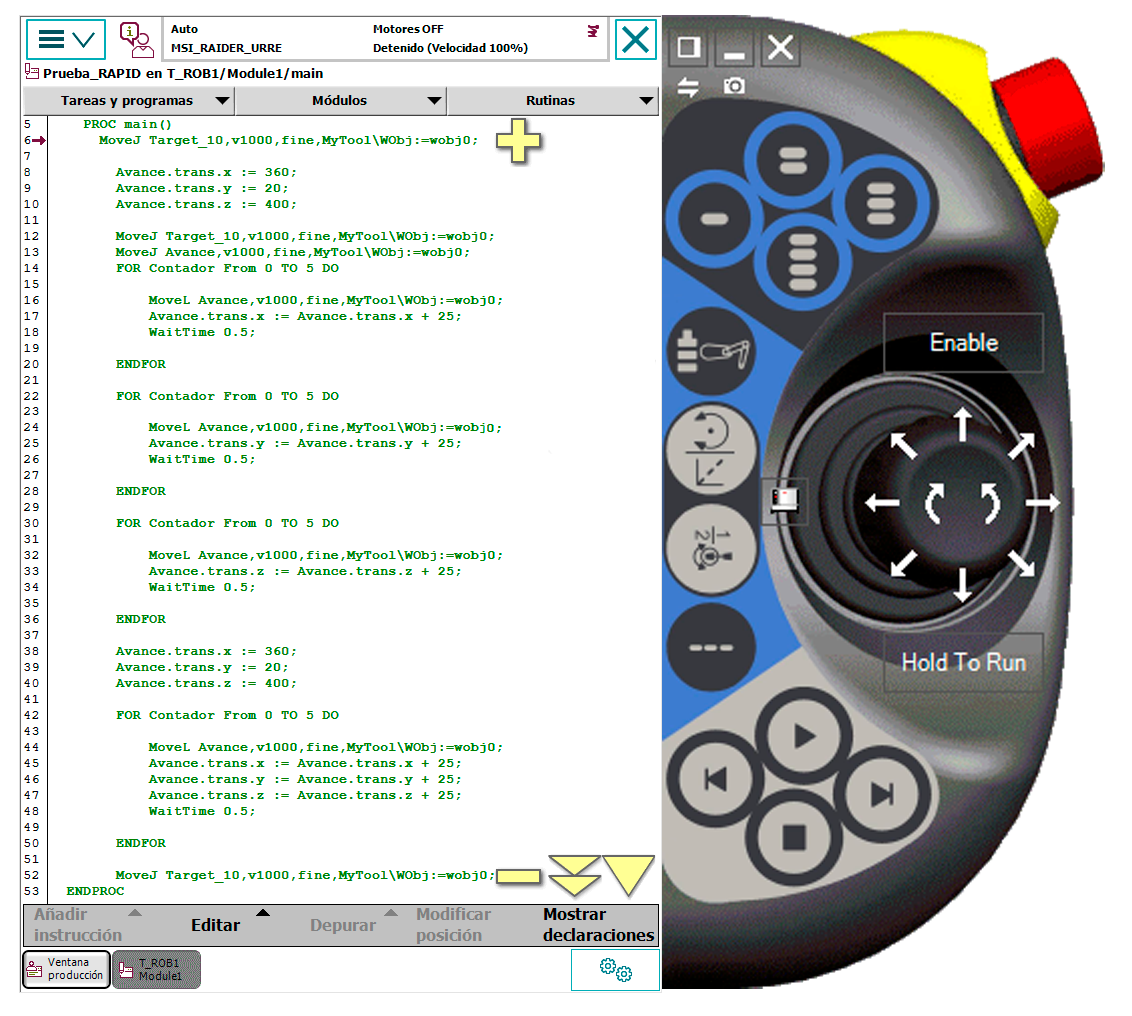
Links de Interese:






Data Publicación: 11/02/2021


Programación 9 ABB.
Aprender Linguaxe RAPID, poderemos programar desde RobotStudio, ou desde a FlexPendant.
- Instrución MoveL Trans; Trans utilízase para modificar o valor dunha das tres coordenadas de un punto, este deberá ser declarado como "Var" para poder modificar valores nel.
- Instrución MoveL Trans; Formato da mesma:
PuntoProgramado.trans.x := Valor a asignar; !Modificar valor eje X PuntoProgramado.trans.y := Valor a asignar; !Modificar valor eje Y PuntoProgramado.trans.z := Valor a asignar; !Modificar valor eje Z - Exemplo usando estas instrucións MoveL Tras & WaitTime; Se quere realizar o exemplo pode tomar como base o exercicio Programación 8 ABB:
MODULE Module1 CONST robtarget Target_10:=[[547.330665099,0,451.64730631],[0.190808996,0,0.981627183,0],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; VAR robtarget Avance:=[[506.304350475,0,371.647255958],[0.19080893,0,0.981627196,0],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; VAR num Contador; PROC main() MoveJ Target_10,v1000,fine,MyTool\WObj:=wobj0; Avance.trans.x := 360; Avance.trans.y := -220; Avance.trans.z := 200; MoveJ Target_10,v1000,fine,MyTool\WObj:=wobj0; MoveJ Avance,v1000,fine,MyTool\WObj:=wobj0; FOR Contador From 0 TO 5 DO MoveL Avance,v1000,fine,MyTool\WObj:=wobj0; Avance.trans.x := Avance.trans.x + 25; WaitTime 0.5; ENDFOR MoveJ Target_10,v1000,fine,MyTool\WObj:=wobj0; ENDPROC ENDMODULE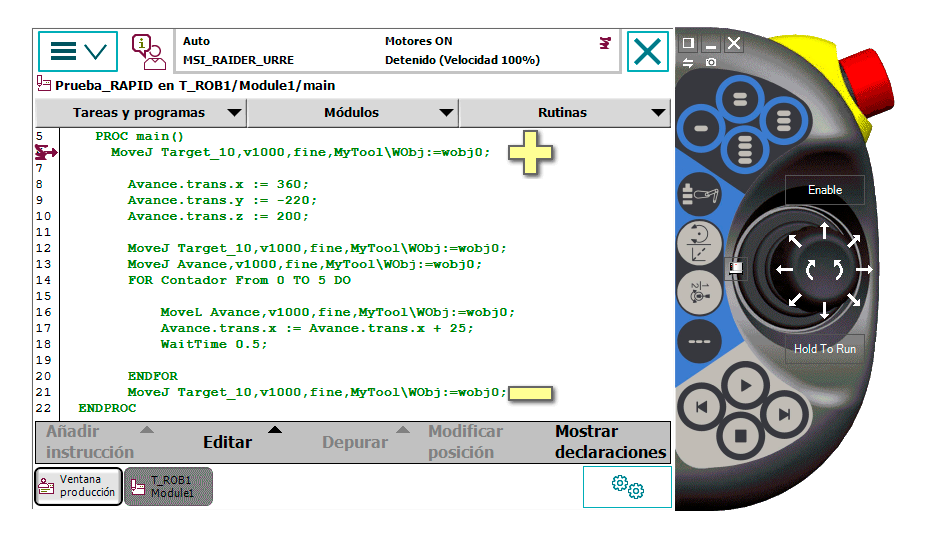
Links de Interese:
Data Publicación: 11/02/2021