Programación 8 ABB.
Aprender Linguaxe RAPID, poderemos programar desde RobotStudio, ou desde a FlexPendant.
- Instrución MoveL RelTool; RelTool (Relative Tool) utilízase para engadir un desprazamento e/ou unha rotación, expresada no sistema de coordenadas da ferramenta activa, a unha posición do robot.
- Instrución MoveL RelTool; Formato da mesma:
MoveL RelTool(Punto_de_referencia,X,Y,Z),velocidad,aproximación,TOOL\BASE; - Exemplo usando estas instrucións MoveL RelTool & WaitTime; Se quere realizar o exemplo pode tomar como base o exercicio Programación 4 ABB:
MODULE Module1 CONST robtarget Target_10:=[[547.330665099,0,451.64730631],[0.190808996,0,0.981627183,0],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; CONST robtarget Target_40:=[[415.304350475,0,451.647255958],[0.19080893,0,0.981627196,0],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; PROC main() MoveJ Target_10,v1000,fine,MyTool\WObj:=wobj0; MoveL RelTool(Target_40,200,200,0),v1000,fine,MyTool\WObj:=wobj0; MoveL RelTool(Target_40,0,0,0),v1000,fine,MyTool\WObj:=wobj0; WaitTime 2; MoveL RelTool(Target_40,0,0,200),v1000,fine,MyTool\WObj:=wobj0; MoveL RelTool(Target_40,0,0,0),v1000,fine,MyTool\WObj:=wobj0; WaitTime 2; MoveJ Target_10,v1000,fine,MyTool\WObj:=wobj0; WaitTime 2; ENDPROC ENDMODULE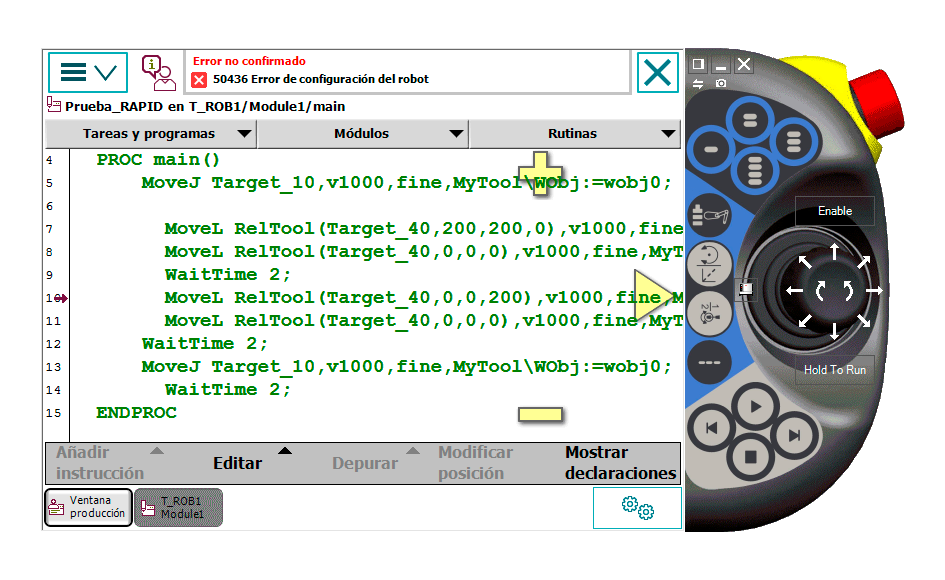
Links de Interese:






Data Publicación: 10/02/2021


Programación 7 ABB.
Aprender Linguaxe RAPID, poderemos programar desde RobotStudio, ou desde a FlexPendant.
- Instrución MoveL Offs; Esta instrución toma como referencia un punto programado e desprazásese deste tanto como lle indicamos, podéndoo facer en x,y,z.
- Instrución MoveL Offs; Formato da mesma:
MoveL Offs(Punto_de_referencia,X,Y,Z),velocidad,aproximación,TOOL\BASE; - Exemplo usando estas instrucións MoveL Offs & WaitTime; Se quere realizar o exemplo pode tomar como base o exercicio Programación 4 ABB:
MODULE Module1 CONST robtarget Target_10:=[[547.330665099,0,451.64730631],[0.190808996,0,0.981627183,0],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; CONST robtarget Target_40:=[[415.304350475,0,451.647255958],[0.19080893,0,0.981627196,0],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; PROC main() MoveJ Target_10,v1000,fine,MyTool\WObj:=wobj0; MoveL Offs(Target_40,200,200,0),v1000,fine,MyTool\WObj:=wobj0; MoveL Offs(Target_40,0,0,0),v1000,fine,MyTool\WObj:=wobj0; WaitTime 2; MoveL Offs(Target_40,0,0,200),v1000,fine,MyTool\WObj:=wobj0; MoveL Offs(Target_40,0,0,0),v1000,fine,MyTool\WObj:=wobj0; WaitTime 2; MoveJ Target_10,v1000,fine,MyTool\WObj:=wobj0; WaitTime 2; ENDPROC ENDMODULE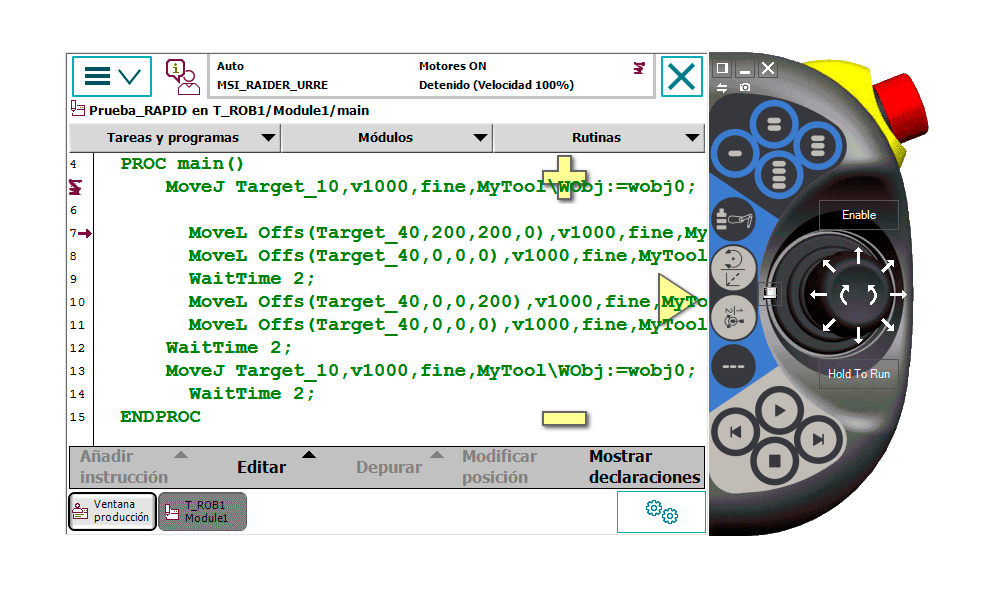
Links de Interese:
Data Publicación: 10/02/2021