Simulación 2 con KUKA Sim Pro, Programación de movimientos PTP.
Programación de robots industriales Off-Line.
| Teach | KRL | Situación | Velocidad |
 |
PTP HOME | A1= 0 A2=-90 A3=90 A4=0 A5=0 A6=0 | 100% |
 |
PTP P1 | 5 cm altura base izq | 100% |
 |
PTP P2 | 1 cm altura base izq | 50% |
 |
WAIT 2 Seg | ||
 |
PTP P3 | 5 cm altura base izq | 50% |
 |
PTP P4 | 5 cm altura base der. | 50% |
 |
PTP P5 | 1 cm altura base der. | 50% |
| |
WAIT 2Seg | ||
 |
PTP P6 | 5 cm altura base der. | 50% |
 |
PTP HOME | A1= 0 A2=-90 A3=90 A4=0 A5=0 A6=0 | 100% |
Links de Interés:
 |
|
 |
 |
Fecha Publicación: 16/10/2020
Simulación 1 con KUKA Sim Pro, Colocación Robot, Mesa, Antorcha y Controlador KRC4.
Programación de robots industriales Off-Line.
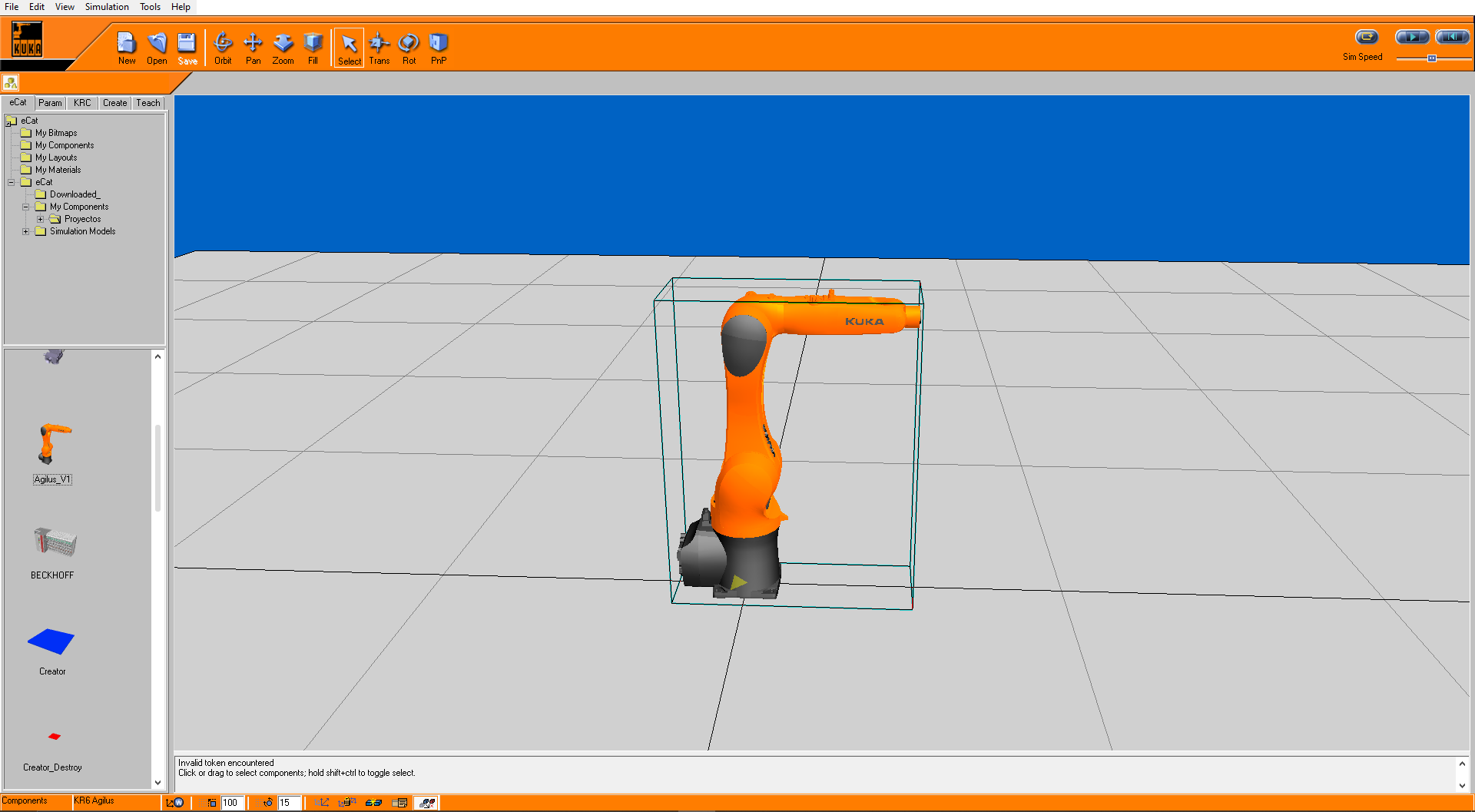
1.- Añadimos el robot: KR 6 R900 SIXX Agilus, "Agilus_V1".
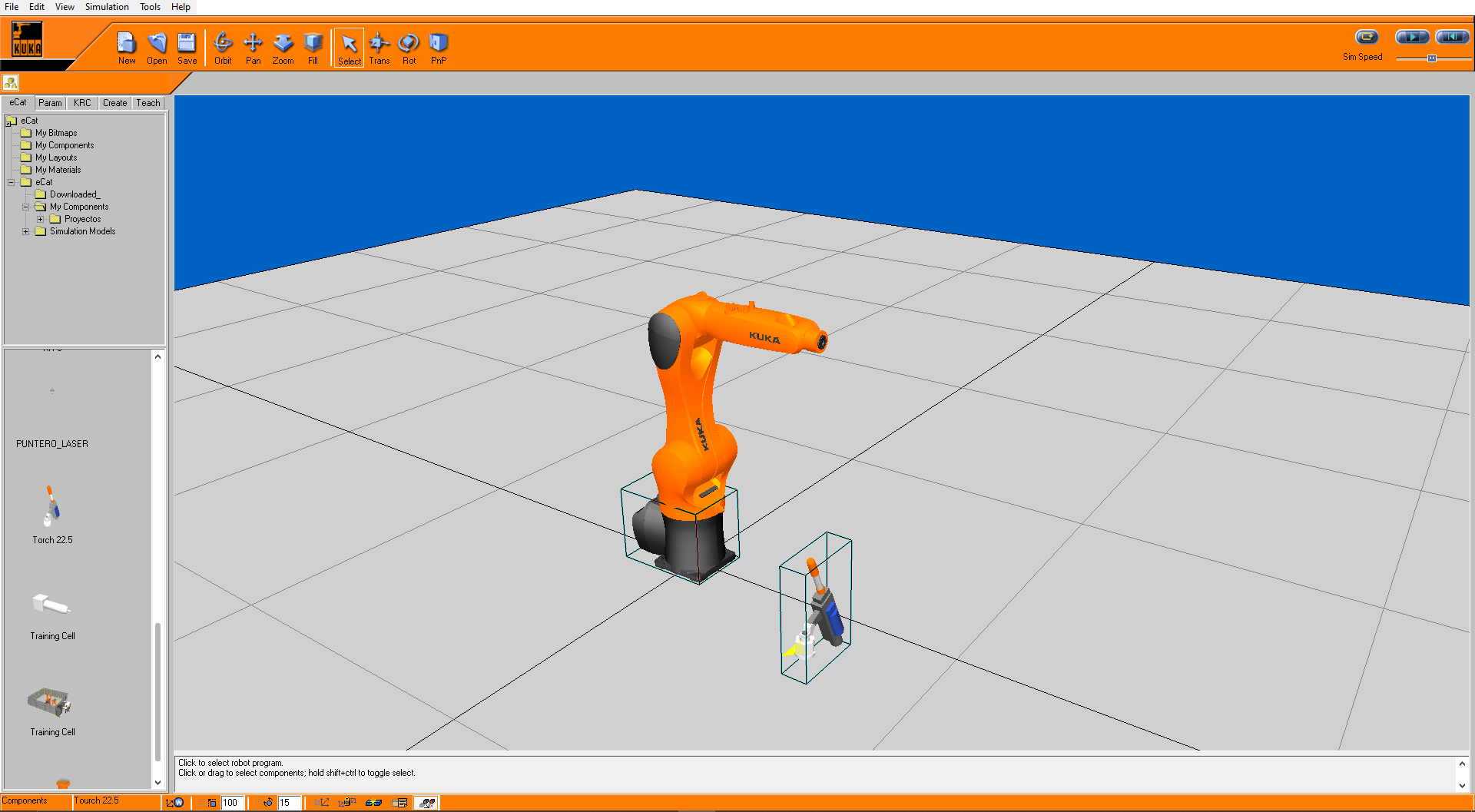
2.- Añadimos la Herramienta: "Torch 22.5".
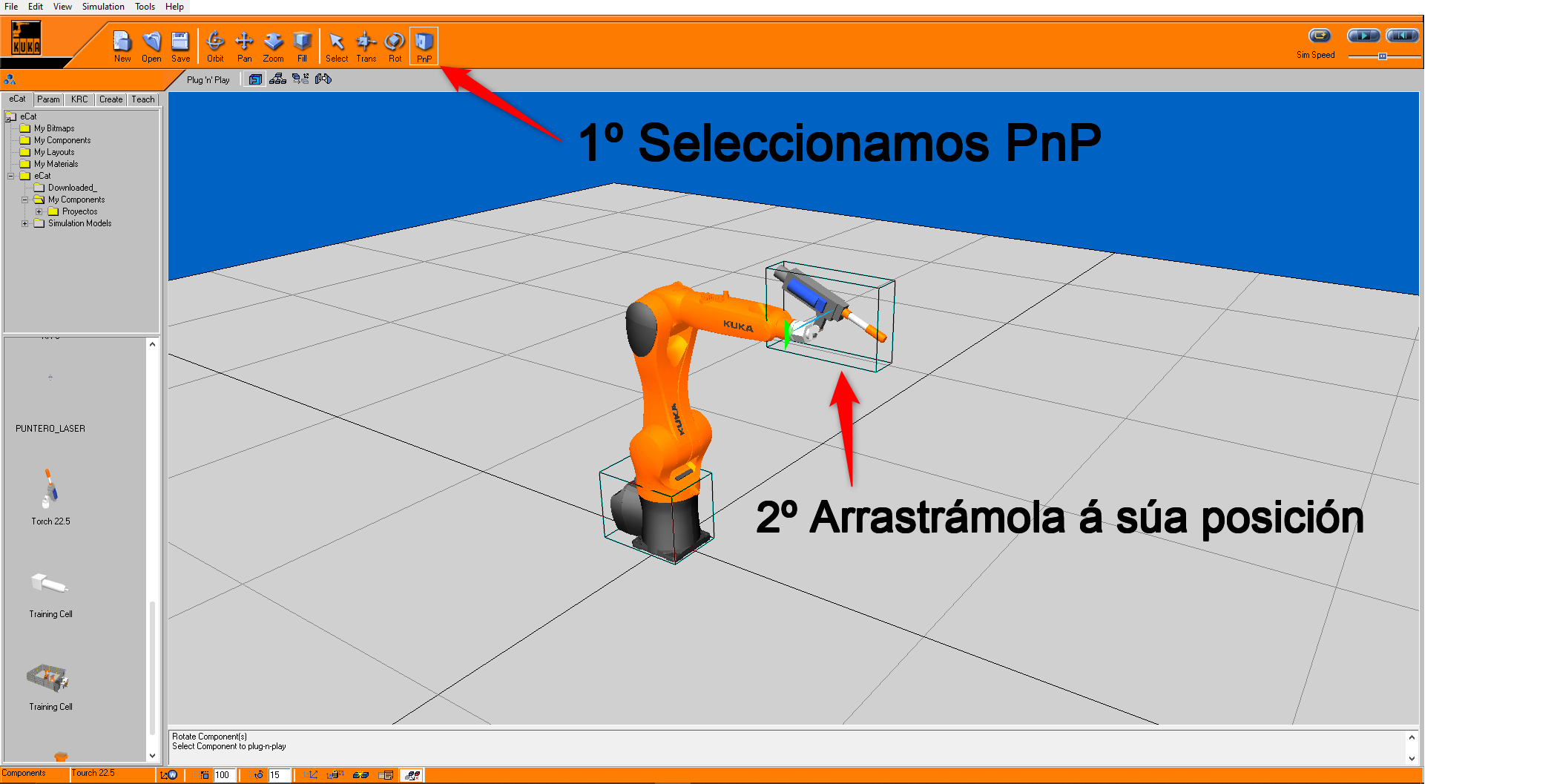
3.- Acoplar la Herramienta al Robot, usando la utilidad (PnP).
Al acercar la herramienta al robot, y tener activa ter activada a función "PnP" saldra una flecha indicando donde se va a unir. Puede que esta nos quede inclinada, y no quede como en la imagen, en el siguiente paso solucionaremos esto.
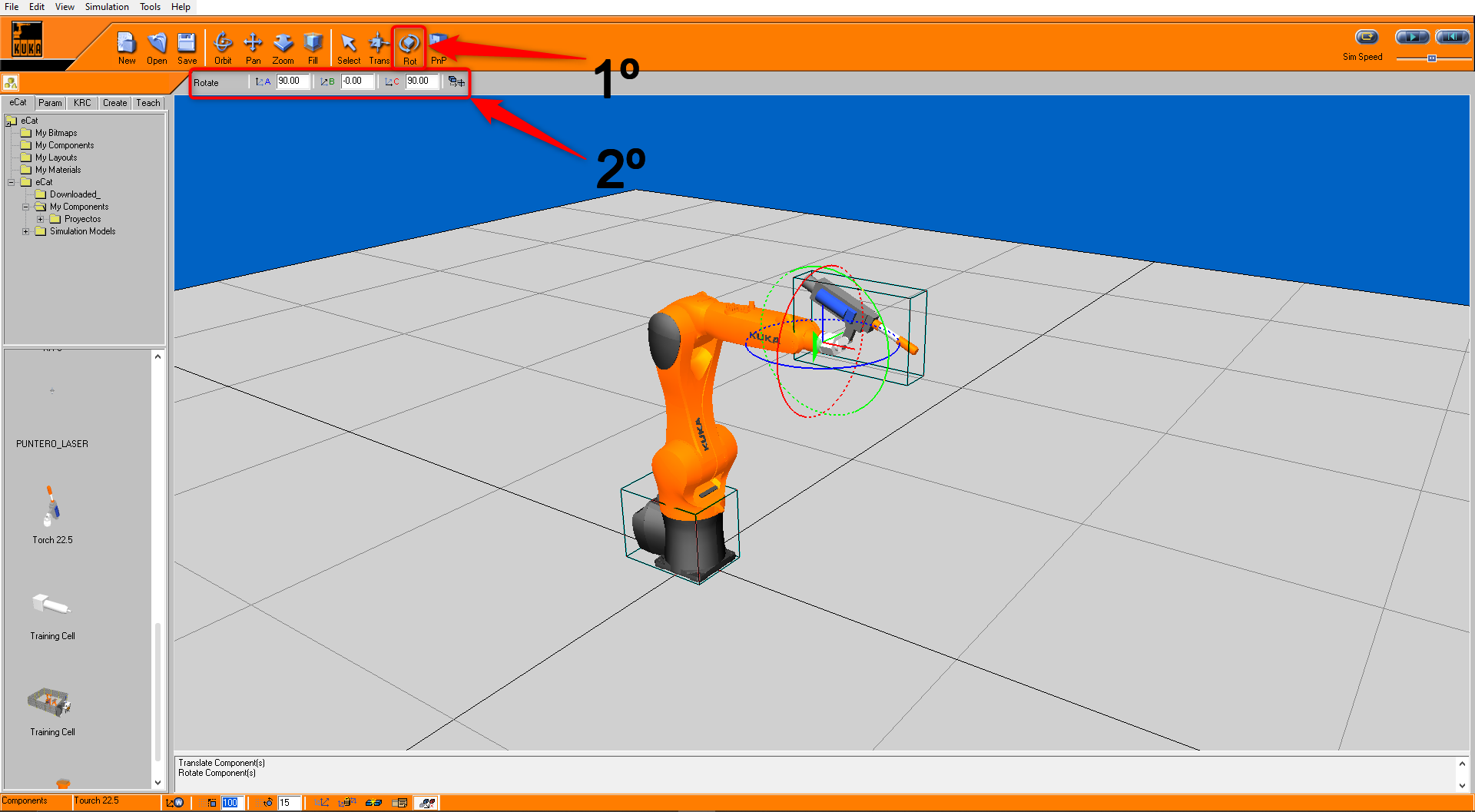
4.- Rotar la Herramienta: "Torch 22.5".
Para dejar la Antorcha perfectamente colocada, en primer lugar seleccionaremos esta con la herramienta " Select", una vez seleccionada usaremos a herramienta "Rot" (Paso 1º), esta nos habilita 3 cuadros de texto, donde introduciremos las medidas de la imagen (Paso 2º). (Para aplicar los cambios pulsaremos "Enter").
5.- Añadir la mesa "Table A".
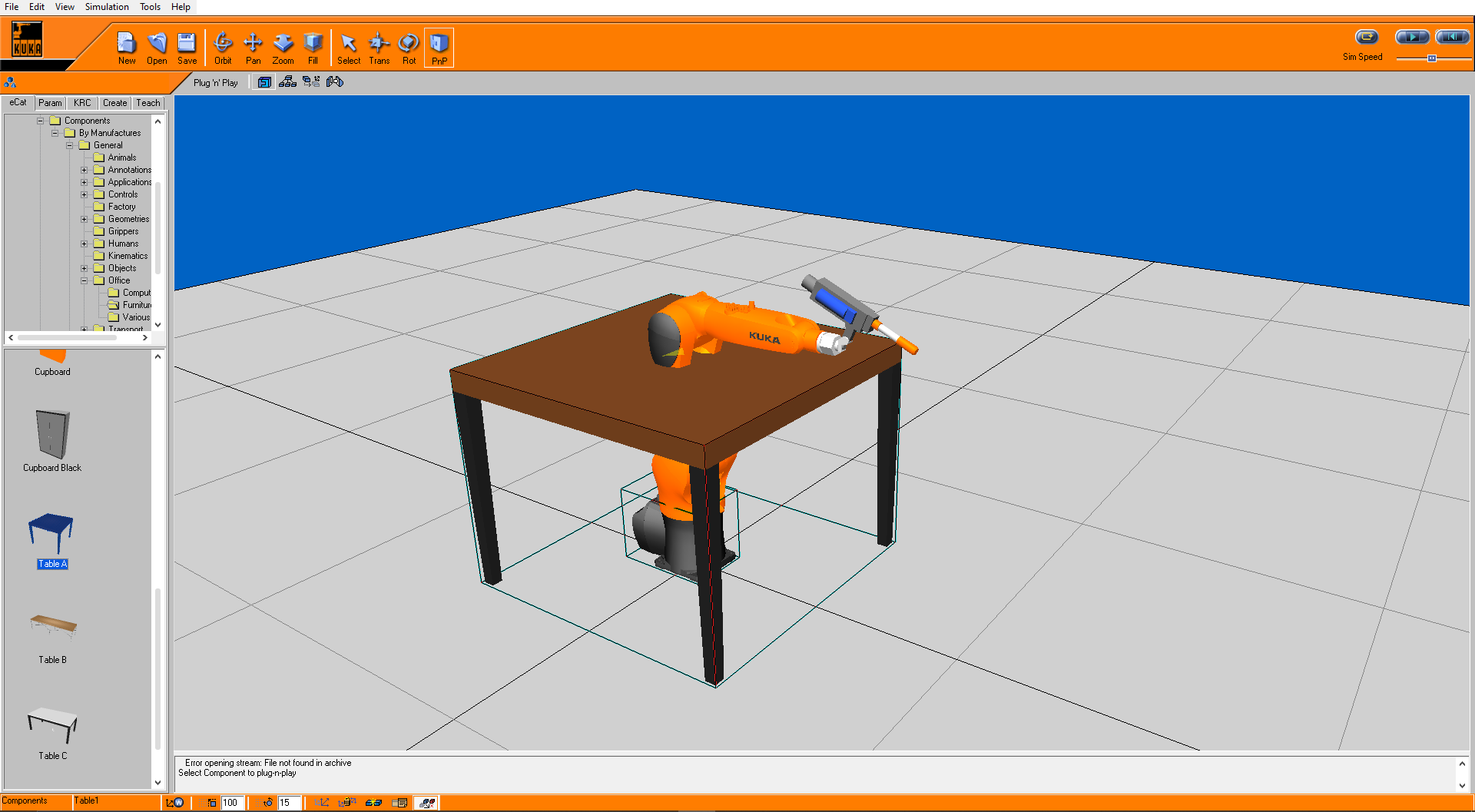
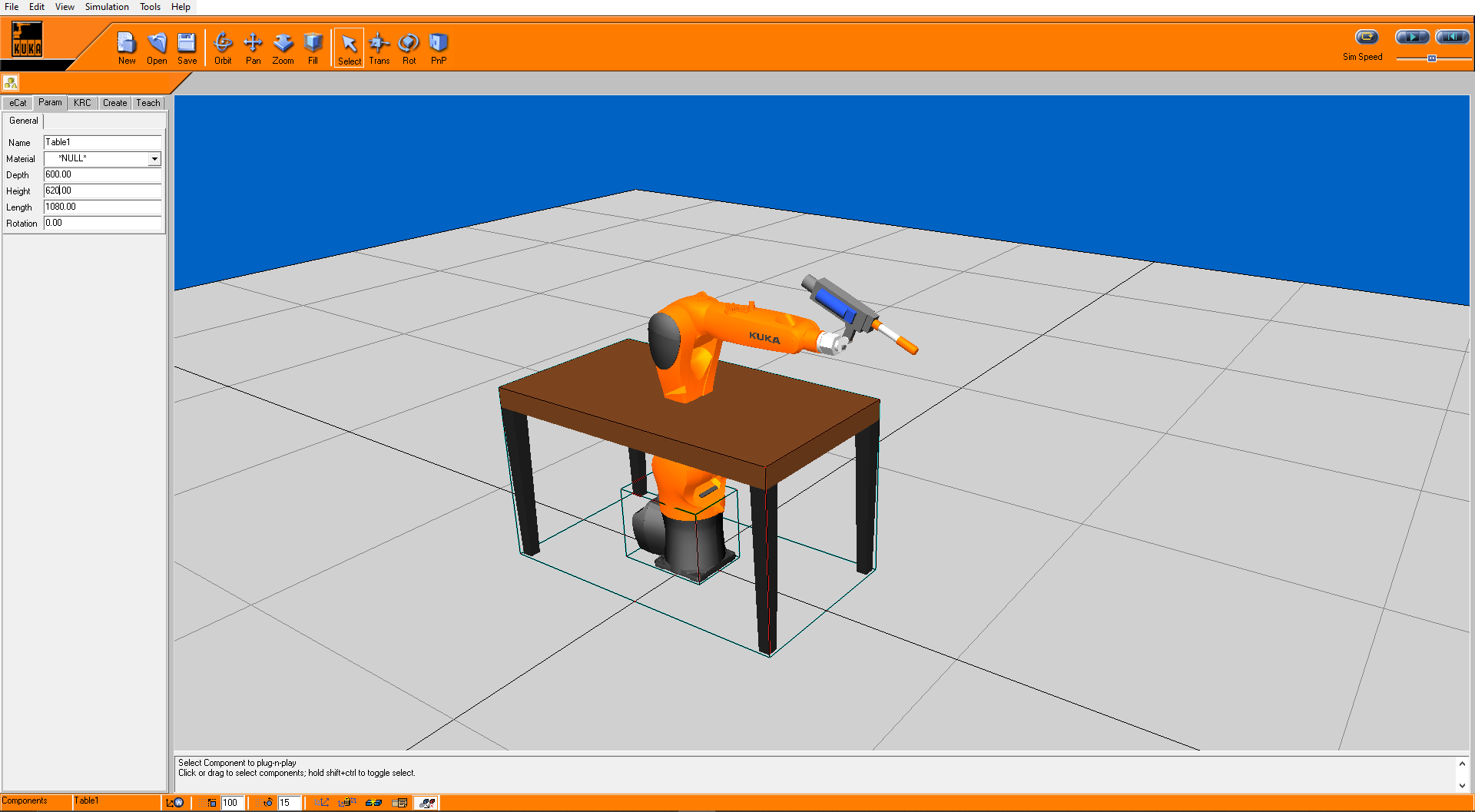
6.- Cambiar las dimensiones a: 1080 x 600 x 620.
Esto lo haremos seleccionando la mesa con la herramienta "Select" (ya usada anteriormente), después iremos a el marguen izquierdo y buscaremos la pestaña que indica: "Param", en esta cambiaremos las medidas.
General
(Para aplicar os cambios pulsaremos "Enter").
Name: Table1 Material: *NULL* Depth: 600.00 Height: 620.00 Length: 1080.00 Rotation: 0.00
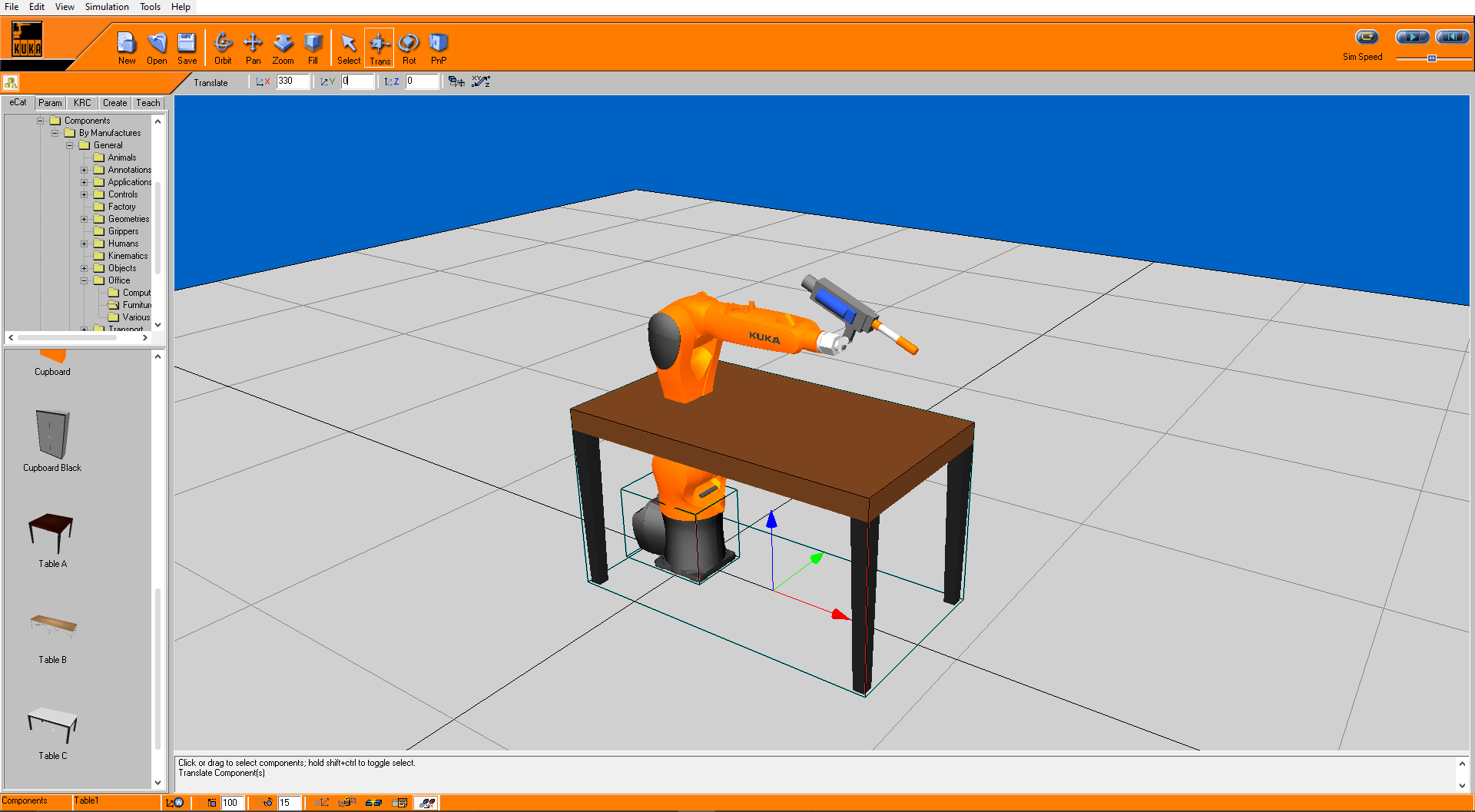
7.- Trasladar la mesa a la posición: X=330, Y=0, Z=0.
Usaremos la Herramienta "Trans", esta nos habilitará 3 Cuadros de texto donde introduciremos las medidas de la imagen. (Para aplicar los cambios pulsaremos "Enter").
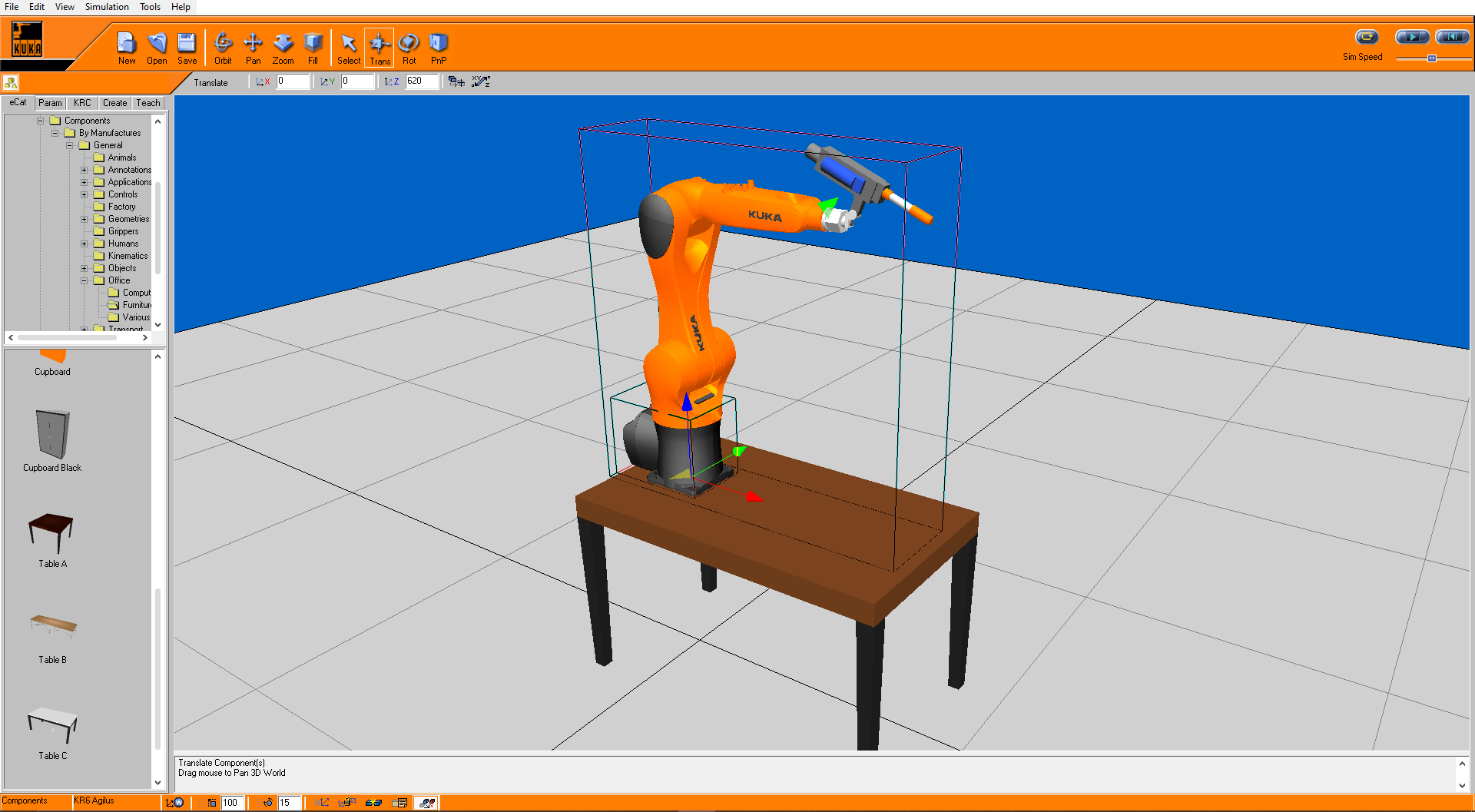
8.- Trasladar el Robot a la posición: X=0, Y=0, Z=620 (Altura de la mesa).
Usaremos la Herramienta "Trans", esta nos habilitará 3 Cuadros de texto donde introduciremos las medidas de la imagen. (Para aplicar los cambios pulsaremos "Enter").
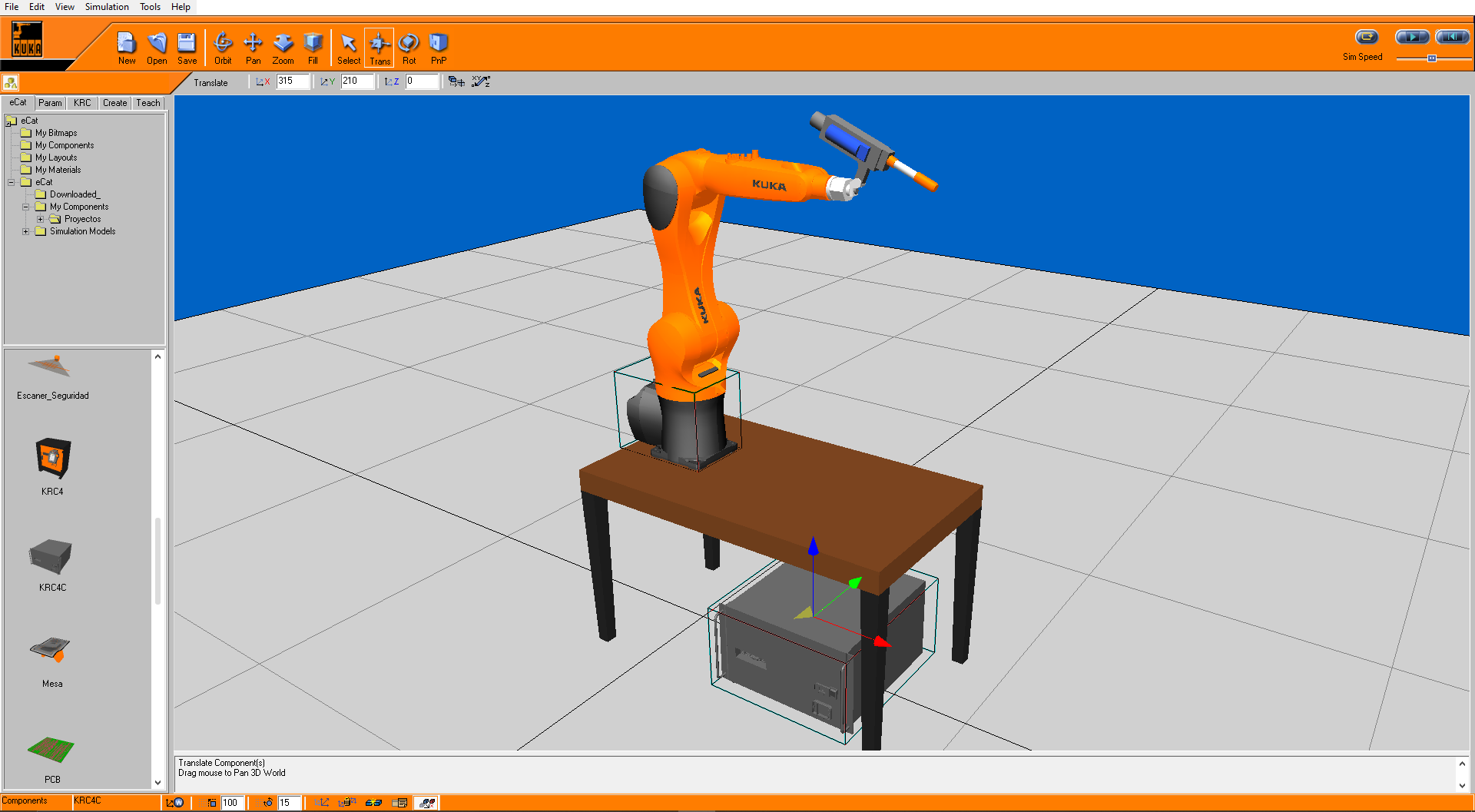
9.- Añadiremos el Controlador "KRC4".
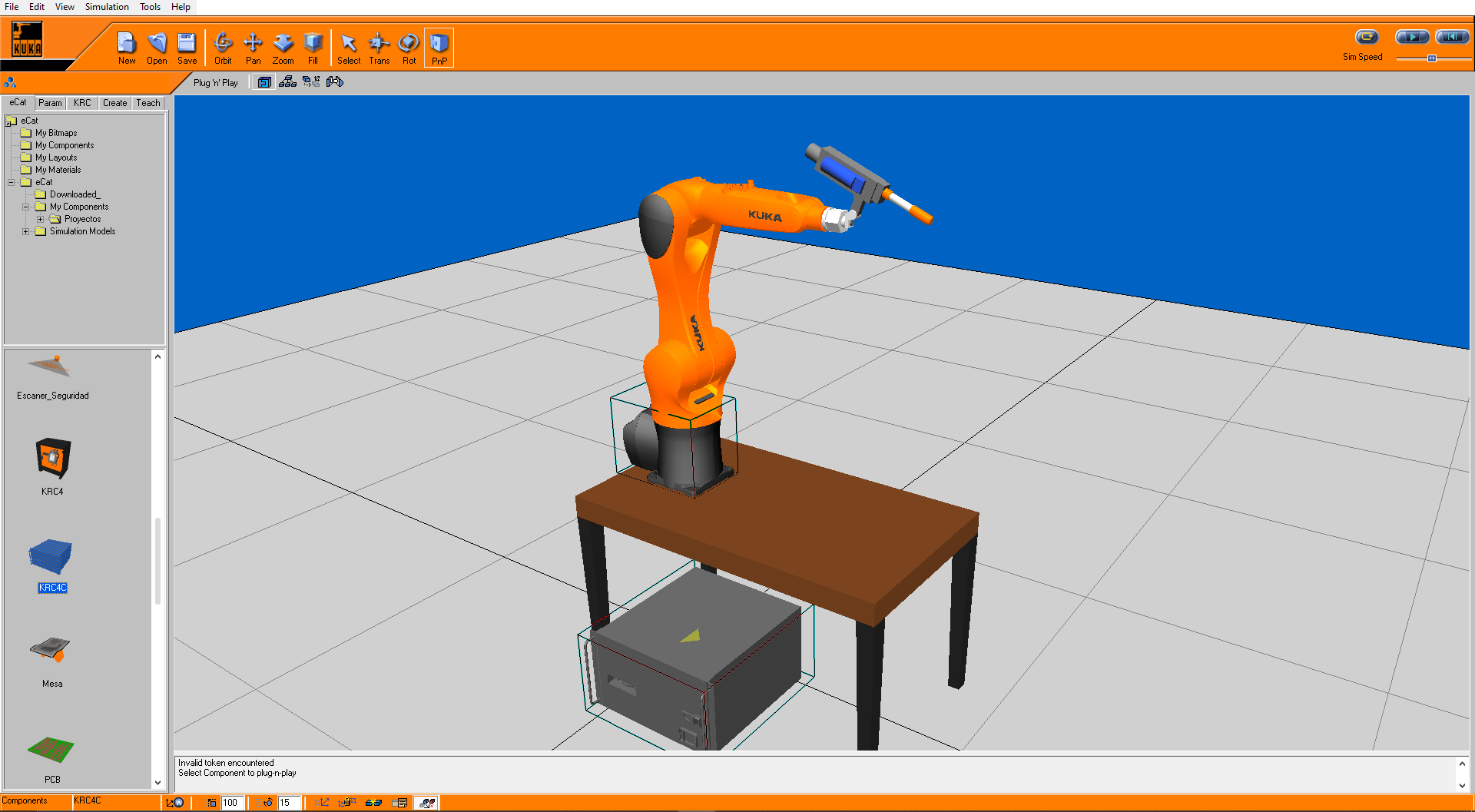
10.- Trasladar el controlador KRC4 a la posición: X=315, Y=210, Z=0.
Usaremos la Herramienta "Trans", esta nos habilitará 3 Cuadros de texto donde introduciremos las medidas de la imagen. (Para aplicar los cambios pulsaremos "Enter").
Links de Interes:
|
|
|
Fecha Publicación: 16/10/2020